КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Позиционные регуляторы
|
|
|
|
Работают по принципу «вкл. – выкл.».Непрерывному изменению входной величины в них соответствует скачкообразное изменение выходного сигнала.
Их реализация осуществляется с помощью контактных и бесконтактных релейных элементов. Бывают двухпозиционные, трехпозиционные и реже многопозиционные регуляторы.
Рассмотрим статические характеристики этих регуляторов.
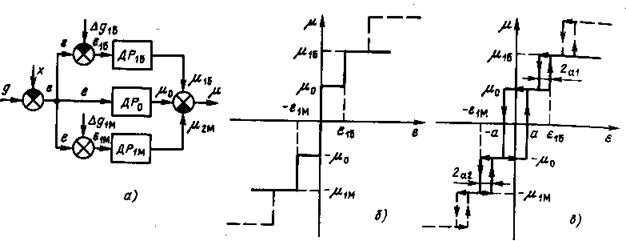
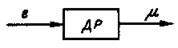 Структурная схема двухпозиционного регулятора
Структурная схема двухпозиционного регулятора
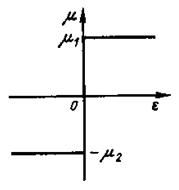
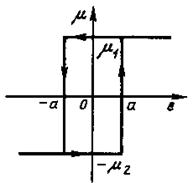
а) без зоны неодназначности б) с зоной неодназначности
Двухпозиционные регуляторы настраиваются таким образом, чтобы значения y и e отсчитывались в приращениях от условного равновесного состояния объекта регулирования, соответствующего расчетным значениям yо и eо, принятым за начало отсчета. Аналитически статические характеристики можно записать следующим образом: а) y = ymax при e > 0 б) y = ymax при e ³ d;
y = - ymax при e < 0 при - d < e < d и de/dt < 0
y = - ymax при e £ -d;
при - d < e < d и de/dt > 0.
Из этих выражений и рисунков видно, что двухпозиционные регуляторы постоянно оказывают на объект регулирования воздействия отличные от значений необходимых для равновесного состояния системы (когда e = 0). В результате АСР с таким регулятором будет работать в автоколебательном режиме и ее переходный процесс будет колебательным в окрестностях ее равновесного состояния. Настраиваемая зона неоднозначности в них называется зоной возврата.
Статические характеристики трехпозиционных регуляторов выглядят следующим образом: а) без зоны неодназначности б) с зоной неодназначности
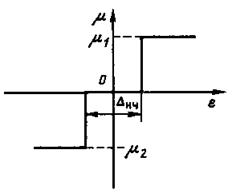
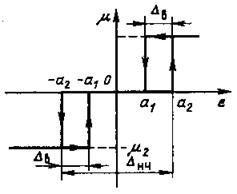
Dнч - зона нечуствительности.
Здесь имеется устойчивое нейтральное положение.
Аналитически статические характеристики выглядят следующим образом:
а) y = ymax при e ³ d б) y = ymax при e ³ d2
при d1 < e < d2 и 
y = 0 при - d < e < d y = 0 при - d1 < e < d2 и 
при - d2 < e < d1 и
y = - ymax при e £ -d y = - ymax при e £ -d2
при - d2 < e <- d1 и 
Из этих выражений и рисунков следует, что трехпозиционные регуляторы имеют устойчивое состояние (y = 0) в окрестностях равновесного состояния системы (когда e = 0), определяемых зоной нечувствительности и зоной неоднозначности. Если при очередном переключении регулятора в состояние y = 0, отклонение регулируемой величины не будет выходить за зону нечувствительности регулятора, то в этом состоянии система регулирования может оставаться бесконечно долго. В системе не будет автоколебательных процессов (не подгорают контакты, увеличивается срок службы).
Позиционными эти регуляторы называются потому, что регулирующий орган занимает в двухпозиционных регуляторах два положения (позиции) – открыто – закрыто, а в трехпозиционных три положения: открыто, закрыто и промежуточное.
Многопозиционный регулятор можно представить как несколько двух позиционных регуляторов с разными уставками их срабатывания и соединенных последовательно.
Статическая характеристика будет выглядеть следующим образом:
Позиционные регуляторы несложны по конструкции, надежны в работе, просты в обслуживании и настройке. Их применяют на объектах с малым инерционным запаздыванием. Часто встраивают во вторичные приборы.
Настроечные параметры: зона возврата и зона нечувствительности.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 3549; Нарушение авторских прав?; Мы поможем в написании вашей работы!