КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электрические ИМ
|
|
|
|
Исполнительные механизмы.
ИМ - это устройство, предназначенное для перемещения РО.
Достоинства:
- возможность удаления ИМ от регулирующего устройства на неограниченные расстояния;
- создание больших перестановочных усилий (до 25 тонн) [перестановочные усилия – усилия, которые преодолевает ИМ при управлении РО];
- относительно высокий класс точности (±1).
Недостатки:
- трудность создания конструкции во взрыво-пожаробезопасном исполнении;
- сложность конструкции, наладки, обслуживания;
- большая масса и стоимость.
Различают электромагнитные и электродвигательные ИМ.
Электромагнитные ИМ.
Данные устройства не входят в состав ГСП (нет нормирующих преобразователей, нет расчетных методик). Носят также название соленоидных. Наибольшее распространение среди них получили электромагнитные приводы серии ЭВ.
Это прямоходные механизмы позиционного действия. Имеют простые конструкции и схемы управления. Неотъемлемой частью электромагнитных ИМ является электромагнит, сердечник которого играет роль затвора, т.е. роль подвижного РО.
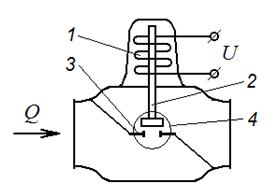 Рассмотрим электромагнитный ИМ с односедельным РО.
Рассмотрим электромагнитный ИМ с односедельным РО.
1 – индукционная катушка;
2 – затвор;
3 – седло;
4 – регулирующий орган.
Среди них различают непосредственного действия и с усилием. РО сильно влияет на работу ИМ, т.к. является источником двух сил нагрузки: гидростатической (из-за перепада давления на затворе) и гидродинамической (обусловленной силой вязкого трения в пограничном слое затвора). Это вызывает вибрацию, сотрясения, нелинейность расходных и ходовых характеристик устройств. Для устранения этих недостатков и используются ИМ с усилением, роль которых играют мембраны, поршни, спицы, отводные каналы и т.п.
Применение электромагнитных ИМ ограничивается позиционным характером действия и массой РО, ибо для создания необходимого усилия при перемещении тяжелого РО приходится значительно увеличивать силу тока катушек соленоида (устройства становятся громоздкими и невыгодными).
Электродвигательные ИМ.
Основными элементами данных устройств являются:
- двигатель;
- путевой выключатель (конечные выключатели, датчики ОС);
- редуктор (понижает число оборотов двигателя и увеличивает крутящий момент на его валу).
Электродвигательные ИМ могут также снабжаться:
- указателем положения выходного органа;
- дистанционной сигнализацией положения РО;
- автоматическим пуском и дистанционным управлением;
- ручным приводом;
- тормозом и др.
Различают устройства с постоянной и переменной скоростью вращения выходного органа, а также однооборотные и многооборотные.
В настоящее время наиболее распространены среди них ИМ серии МЭ:
МЭО – однооборотные;
МЭМ – многооборотные;
МЭП – прямоходные;
МЭОК – управление с помощью контактных устройств;
МЭОБ – управление с помощью бесконтактных устройств.
МЭК (МЭК-Б) – с переменной скоростью вращения, управление с
помощью контактных (бесконтактных) устройств;
А). ИМ с постоянной скоростью вращения
В таких механизмах скорость перемещения не зависит от величины сигнала управления, а направление перемещения определяется знаком входного сигнала. Функциональная схема такого ИМ выглядит следующим образом:
хр- командный сигнал информации;
l, ω - линейное и угловое перемещения (ωд = const).
 Позиционер – регулятор положения выходного звена ИМ.
Позиционер – регулятор положения выходного звена ИМ.
Б). ИМ с переменной скоростью вращения
Рассмотрим принципиальную схему такого устройства. В данном механизме используется обратная связь по частоте вращения асинхронного двигателя. Величина и фаза переменного входного напряжения Uвх является управляющим сигналом и определяет значение тока в выходных цепях ФЧУВ, а следовательно и сопротивление рабочих обмоток магнитных усилителей МУ. При одной фазе МУ1 открывается, а МУ2 запирается, а при изменении фазы напряжения на 180° - наоборот. При этом двухфазный асинхронный двигатель реверсируется. Если Uвх = 0 оба МУ ненасыщенны и их сопротивление велико по сравнению с сопротивлением обмоток электродвигателя. На конденсаторе ток равен нулю и двигатель неподвижен.

ФЧУВ – фазочувствительный управляющий выпрямитель;
Rос – сопротивление обратной связи.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 773; Нарушение авторских прав?; Мы поможем в написании вашей работы!