КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Линейные регуляторы непрерывного действия
Выход у линейных регуляторов описывается дифференциальными уравнениями. Промышленностью серийно регуляторы, которые реализуют пять законов регулирования:
П – пропорциональные; И – интегральные;
ПИ – пропорционально-интегральные;
ПД – пропорционально-дифференциальные;
ПИД – пропорционально-интегрально-диффиренциальные.
В этих регуляторах предусматривается возможность изменения некоторых коэффициентов их дифференциальных уравнений, называемых параметрами настройки регулятора. Такими параметрами настройки являются:
- коэффициент передачи (усиления) регулятора;
- постоянная времени интегрирования;
- постоянная времени дифференцирования;
- постоянная времени изодрома;
- постоянная времени предварения;
Изменяя значения этих параметров, меняют тем самым динамические характеристики регулятора с целью обеспечения качества работы АСР в целом. Значения, при которых достигаются лучшее качество работы системы, называются оптимальными.
Кроме органов настройки непосредственно изменяющих коэффициенты дифференциального уравнения регулятора, они, как правило, имеют органы настройки, косвенно влияющие на эти коэффициенты и изменяющие параметры статических характеристик регулятора или режимы его работы. Например, влияющие на чувствительность регулятора, демпфирование входного сигнала, длительность импульсов при релейно-импульсном способе формирования закона регулирования и др. К этим органм настройки относятся:
- нечувствительность регулятора; - постоянную времени демпфирования;
- длительность импульсов и т.д.
Пропорциональные.
Передаточная функция W(р) = k (закон регулирования – y = ke)
Где e - рассогласование;
k – коэффициент усиления (передачи).
Настроечный параметр такого регулятора – предел пропорциональности:
d = (1 /k) × 100 %,
который показывает, какому отклонению регулируемой величины (в % от максимально возможной для данной АСР) соответствует перемещение регулирующего органа из одного крайнего положения в другое.
Промышленные П-регуляторы состоят из усилителя, охваченного отрицательной обратной связью с коэффициентом усиления.

|





 |
(отр. ОС)
|
 | |||
 | |||
В нашем примере усилительное звено имеет передаточную функцию W(p) = k1 и
обратная связь коэффициент усиления k2 . Тогда передаточная функция регулятора определится следующим выражением  ,
,
где Wп(p), Wо(p) – передаточные функции прямой и обратной связей соответственно.
Подставляя значения передаточных функций в выражение, получим
 . Т.к. k1 >> 1, то 1/k2 » 0 1. Тогда
. Т.к. k1 >> 1, то 1/k2 » 0 1. Тогда  .
.
Достоинство – быстродействие, недостаток - наличие статической ошибки.
Интегральные.
Передаточная функция W = 1/(Тир) или W = k/р (закон рег-я – y = (1/Ти) ò edt)
где Ти – постоянная интегрирования, а 1/Ти часто обозначают как коэффициент передачи k. Параметром настройки регулятора является постоянная времени интегрирования или k.
Промышленные И-регуляторы реализуются путем охвата инерционного звена первого порядка с коэффициентом усиления равным единице положительной статической обратной связью. (Статической обратной связью называется такая связь, передаточная функция которой равна 1) Т.е. структурная формула выглядит следующим образом:
|
 ε ЭС у
ε ЭС у

|
(пол. ОС)
|
 где k1 = 1.
где k1 = 1.
Тогда передаточная функция регулятора определится следующим выражением
 ,
,
где Wп(p), Wо(p) – передаточные функции прямой и обратной связей соответственно.
Подставляя значения передаточных функций в выражение, получим
 .
.
Пропорционально-интегральные.
Передаточная функция W = k + 1/(Тир) (закон регулир-я – y = ke + (1/Ти) ò edt)
Если при настройке регулятора установить большое значение Ти, то он превратиться в П-регулятор.
ПИ-регулятор имеет следующую структурную схему
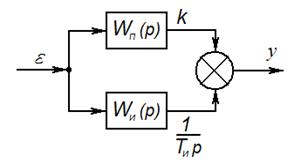
Т.е. промышленно эти регуляторы состоят из двух параллельно включенных звеньев: усилительного и интегрирующего.
Кроме этой на практике применяется следующая структурная схема ПИ-регулятора.
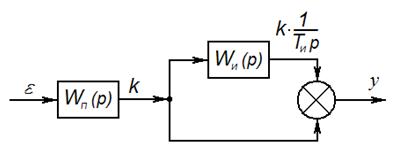 Данная схема реализует закон вида
Данная схема реализует закон вида
y = k[e + (1/Тиз) ò edt],
где Тиз - время изодрома.
Передаточная функция регулятора
W(p) = k[1 + 1/(Тизр)].
 Таким образом такой регулятор имеет взаимосвязанные параметры настройки статической и астатической частей по коэффициенту усиления k, т.к. при его настройке изменяться постоянная времени интегрирования. Как видно из приведенных выражений Т = Тиз / k. В первой модели при изменении коэффициента усиления скорость нарастания интегральной составляющей не изменится, во второй она изменится пропорционально.
Таким образом такой регулятор имеет взаимосвязанные параметры настройки статической и астатической частей по коэффициенту усиления k, т.к. при его настройке изменяться постоянная времени интегрирования. Как видно из приведенных выражений Т = Тиз / k. В первой модели при изменении коэффициента усиления скорость нарастания интегральной составляющей не изменится, во второй она изменится пропорционально.
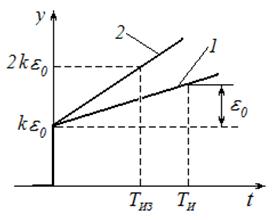
Графически законы приведенных регуляторов и будут выглядеть следующим образом:
1 – классический вариант
2 – с общим коэффициентом усиления.
Как видно из графика время изодрома - это время за которое произойдет увеличение пропорциональной составляющей в два раза при действии только интегральной составляющей. Как видно из графиков быстродействие регуляторов с общим коэффициентом выше, причем скорость нарастания интегральной составляющей с увеличением коэффициента усиления будет возрастать.
Пропорционально-дифференциальные и пропорционально-интегрально-дифференциальные регуляторы.
При наличии дифференциальной составляющей выходной сигнал регулятора изменяется относительного входного сигнала с некоторым опережением равным de/dt и дальнейшем его уменьшении со временем. Когда опережение становится равным 0, выходной сигнал не изменяется, т.е. y = 0.
Законы ПД и ПИД в дифференциальной форме имеют следующий вид
ПД –  , ПИД –
, ПИД –  .
.
Передаточные функции этих регуляторов определяются следующими выражениями
 ,
,  ,
,
Эти промышленные регуляторы образуются путем параллельного соединения динамических звеньев: ПД - пропорционального и дифференциального, ПИД - пропорционального, интегрального и дифференциального. Если у ПИД регулятора устанавливать k = 0, Ти = 0 и Тд = 0 в различном сочетании, то можно получать П, И, ПИ, ПД-законы регулирования.
Также, как и для закона ПИ- регулирования, структурные схемы ПД и ПИД-регуляторов могут быть реализованы с общим коэффициентом усиления.
|
|
Дата добавления: 2014-12-16; Просмотров: 887; Нарушение авторских прав?; Мы поможем в написании вашей работы!