КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Импульсные регуляторы с исполнительными механизмами
|
|
|
|
постоянной скорости
Релейные (позиционные) регуляторы имеют нелинейную характеристику. ИМ постоянной скорости (т.е. с постоянной скоростью вращения выходного вала S) в комплекте с его пусковым устройством имеет статическую характеристику следующего вида
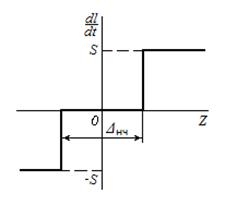 Без учета времени разгона и торможения характеристика записывается как dl/dt = f(Z),
Без учета времени разгона и торможения характеристика записывается как dl/dt = f(Z),
где l – перемещение РО;
Z – сигнал на входе пускового устройства;
Δ нч – зона нечувствительности.
Это обусловлено тем, что в качестве пусковых устройств, как правило, используются релейные электромагнитные аппараты (магнитные пускатели, электромагнитные реле и т.п.).
 Статическая характеристика ИМ постоянной скорости является существенно нелинейной. Однако такой ИМ может иметь достаточно близкие к линейным характеристики при релейно-импульсном изменении входного сигнала. Подадим на его вход подавать импульсы входного сигнала Zн (напряжения) с периодом следования Т и скважностью
Статическая характеристика ИМ постоянной скорости является существенно нелинейной. Однако такой ИМ может иметь достаточно близкие к линейным характеристики при релейно-импульсном изменении входного сигнала. Подадим на его вход подавать импульсы входного сигнала Zн (напряжения) с периодом следования Т и скважностью
γ = Δtимп/Т, (1)
где Т = Δtимп + Δtпауз – период следования им-
пульсов;
Δtимп – длительность импульсов;
Δtпауз – длительность пауз.
Во время поступления импульса ИМ будет перемещать РО с постоянной скоростью dl/dt=S=tgα.
Во время пауз ИМ будет неподвижен. Тогда средняя скорость перемещения РО
dl/dt = tgβ = ΔtимпS/Т
или с учетом (1) dl/dt= γS.
Преобразовав по Лапласу, получим WИМ(p) = L(p)/Г(р) = S/р.
Т.о., по каналу «скважность следования импульсов – усредненное перемещение РО» ИМ постоянной скорости можно представить интегрирующим звеном. Из рисунка видно, что при неизменной скважности чем меньше Δtимп и Δtпауз (а, следовательно Т) тем точнее будет реализация интегрального закона (пилообразная кривая будет ближе к прямой, изображающей среднюю скорость перемещения РО). Однако при этом повышается частота включения ИМ а, следовательно, его износ.
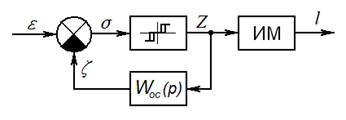
Если ИМ с пусковым устройством охватить отрицательной ОС в виде усилительного звена с передаточной функцией WОС(p) = kос
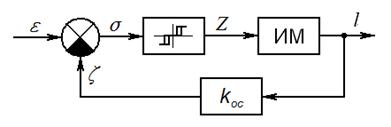
то при релейно-импульсном регуляторе c ИМ постоянной скорости можно реализовать закон П-регулирования.
При поступлении на вход регулятора рассогласования | ε | > Δ нч/ 2 включается и перемещает РО в сторону ликвидации рассогласования. Перемещение РО через канал ОС пердается в виде сигнала ξ, который уменьшает результирующий сигнал σ,
воздействующий на релейный элемент. При | σ | < Δ нч/ 2 ИМ отключится.
Т.к. сигнал ОС ξ = kос l, то в установившемся состоянии σ = ε – kос l < Δ нч/ 2. Ввиду того, что Δ нч регулятора имеет малое значение это выражение можно записать как ε = kос l = 0. Откуда WР(p) = L(p)/Е(р) = 1/ kос.
Т.о. такая схема приближенно реализует П-закон регулирования с коэффициентом передачи kР =1/ kос .
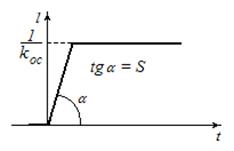 Переходная характеристика при поступлении на вход единичного ступенчатого воздействия (сигнала ε(t)=1) здесь будет выглядеть следующим образом
Переходная характеристика при поступлении на вход единичного ступенчатого воздействия (сигнала ε(t)=1) здесь будет выглядеть следующим образом
C помощью импульсного регулирования можно реализовать закон ПИ-регулирования по следующей структурной схеме:
 В этом случае релейный усилитель при включении ИМ охватывается отрицательной ОС в виде апериодического звена первого порядка с передаточной функцией
В этом случае релейный усилитель при включении ИМ охватывается отрицательной ОС в виде апериодического звена первого порядка с передаточной функцией
WОС(p) = k/(1 + Тр).
В качестве обратной связи в большинстве современных регуляторов используются RC-цепи.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 1334; Нарушение авторских прав?; Мы поможем в написании вашей работы!