КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Релейно-позиційний закон регулювання
|
|
|
|
Основні закони регулювання САР
Першочергову оцінку правильності роботи автоматичного регулятора може виконати досвідчений оператор, а налагоджений регулятор повинен копіювати його дії. На рис. 17 показана принципова схема регулювання рівня води з двопозиційним регулятором.
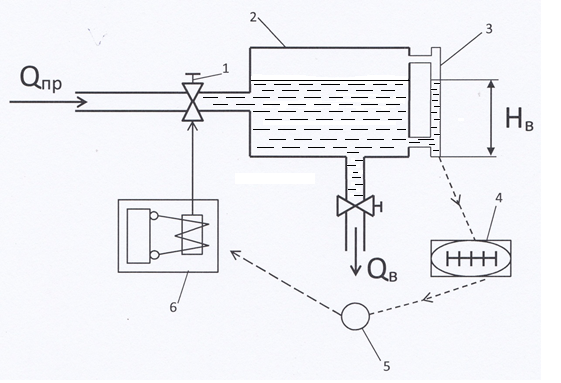
Рис. 17. Принципова схема регулювання рівня води в баку двопозиційним регулюючим органом:
1 – регулюючий орган; 2 – бак; 3 – скляна трубка; 4 – прилад; 5 – оператор або автоматичний регулятор; 6 – керуючий орган.
З рис.17 видно, що оператор 5 переміщує орган 1 з положення “відкрито” в положення “закрито” при помітному відхиленні рівня води Нв водомірної трубки 3 вище або нижче необхідного рівня.
Розглянутий спосіб регулювання називається двупозиціонний - за кількістю позицій, які може займати регулюючий орган, а закон регулювання можна написати двома рівняннями:
 , (4)
, (4)
де ХР – положення регулюючого органу;
Хвідх- відхилення регулюючої величини.
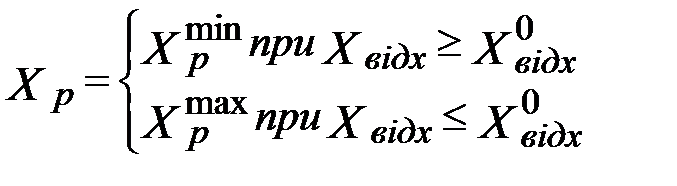
Залежність між положенням регулюючого органу ХР і відхиленням регулюючої величини Хвідх можна записати функцією (5), яка визначає закон регулювання:
 (5)
(5)
Закон регулювання, який відповідає вищевказаним рівнянням називається позиційним або Рп – законом.
При такому законі регулювання, кваліфікація оператора не впливає на технологічний процес регулювання.
Функцію оператора може виконувати контрольно-вимірювальні прилади 3 і 4 разом з електромагнітним контактним пристроєм (керуючим органом) 6, який управляє сервоприводом в потрібному напрямку.
Графік руху  для цього закону регулювання показаний на рис.18.
для цього закону регулювання показаний на рис.18.
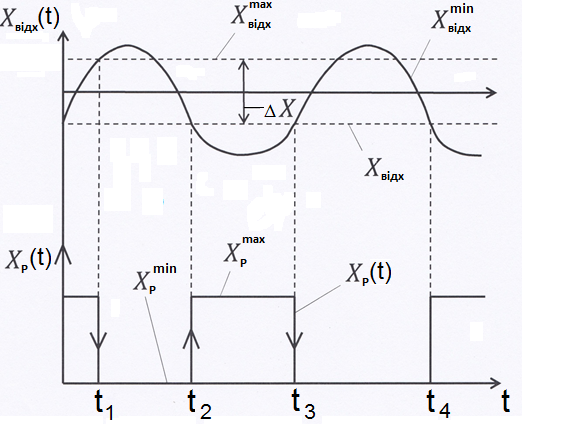
Рис.18. Система регулювання рівня води в баку з двопозиційним регулюючим органом:
t1, t2, t3, t4 – точки перемикання.
Закон регулювання, який здійснює розглянутий регулятор, описується нелінійної статичною характеристикою, яка пов'язує Хр з встановленим значенням Хвідх. Тому розглянутий регулятор є нелінійною динамічною ланкою з релейною характеристикою і носить назву релейного позиційного  - регулятора.
- регулятора.
Двохпозиційні промислові регулятори виконуються на базі стрілочних або самописних вимірювальних приладів, вони забезпечені контактним пристроєм або регулюючою приставкою, яка управляється сервоприводом регулюючого органу. На теплових електричних станціях широкого поширення набули двохпозиційні регулятори прямої дії.
12.2. Пропорційний закон регулювання (П – закон)
Крім релейно-позиційного регулятора є пропорційний закон регулювання (скорочено П- закон), при якому клапан системи регулювання можна переміщати пропорційно відхиленню регульованої величини.
У цьому випадку зв'язок між ХР и Хвідх або закон регулювання можна виразити рівнянням:
 , (6)
, (6)
де ХР – положення регулюючого органу;
Хвідх – відхилення регульованої величини;
КР – коефіцієнт пропорційності.
12.3. Інтегральний закон регулювання (І – закон)
Регулювання можна здійснювати ще й так, щоб швидкість переміщення клапанів була пропорційна величині відхилення tпп °C.
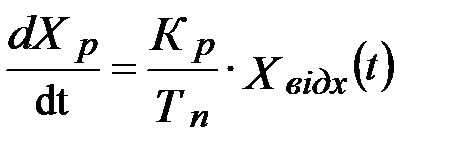 (7)
(7)
Проінтегрувавши рівняння (7), отримаємо
 (8)
(8)
Рівняння (5) або зазначений спосіб перестановки клапана характеризує інтегральний закон регулювання, або І – закон регулювання.
12.4. Пропорційно-диференційний закон регулювання (ПД - закон)
Крім вищерозглянутих законів регулювання розглянемо два способи регулювання при яких:
· переставляється регулюючий орган на величину, пропорційну відхиленню і швидкості відхилення Хвідх(t);
· регулюючий орган переміщується зі швидкістю пропорційно відхиленню і швидкості відхилення Хвідх(t).
При таких способах регулювання оператор керується не тільки величиною відхилення температури, але і напрямом її зміни по кривій запису потенціометра.
При першому способі зв'язок між Хр и Хвідх запишеться:
 , (9)
, (9)
де КР і ТП – коефіцієнти пропорційності і постійні по часу.
Закон регулювання відповідно до найменування складових правої частині носить назву пропорційно - диференціального, або ПД- закон.
Наявність ПД- регулювання в замкнутій САР також призводить до відхилення регульованої величини в кінці процесу регулювання.
12.5. Пропорційно-інтегральний закон регулювання (ПІ – закон)
Другий спосіб перестановки клапана описується рівнянням
 (10)
(10)
Проінтегрувавши праву і ліву частини рівняння (7) отримаємо:
 (11)
(11)
Такий закон регулювання відповідно до найменування складових правої частини рівняння (11) носить назву пропорційно-інтегрального, або ПІ- закону.
12.6. Пропорційно-інтегрально-диференційний закон регулювання (ПІД – закон)
Інерційність ділянки регулювання можна врахувати, якщо переміщати клапан, керуючись, крім сигналів, пропорційних відхилень температури і її швидкості на виході пароперегрівача, додатковим сигналом, що враховує прискорення (уповільнення) зміни температури, тобто величиною і знаком її другої похідної за часом  .
.
Переміщення регулюючого органу в цьому випадку описують рівнянням:
 (12)
(12)
або
 , (13)
, (13)
де КД и ТП – коефіцієнти пропорційності і постійна по часу диференційної складової в законі регулювання.
Зазначений закон називається пропорційно-інтегрально- диференційним законом регулювання. ПІД - закон забезпечує велику швидкодію при переміщенні регулюючого органу в порівнянні з ПІ- законом.
Сучасні автоматичні регулятори різних систем мають єдину класифікацію за видом законів регулювання, які в них реалізуються.
Відповідно до вищенаведених рівнянь існують такі типи регуляторів:
· релейний позиційний, Рп - регулятор;
· пропорційний, П- регулятор;
· пропорційно-диференційний, ПД- регулятор;
· пропорційно-інтегральний, ПІ- регулятор;
· пропорційно-інтегрально-диференціальний, ПІД- регулятор.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 1372; Нарушение авторских прав?; Мы поможем в написании вашей работы!