КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Подвижные системы координат
|
|
|
|
Лекция 12
Подвижные системы координат могут участвовать как во вращательном, так и в поступательном движениях относительно некоторой неподвижной инерциальной системы координат. На рис. 12.1 изображена подвижная система координат  , которая совершает вращательное и поступательное движения относительно инерциальной системы координат
, которая совершает вращательное и поступательное движения относительно инерциальной системы координат  . Положение материальной точки р, обладающей масcой m, относительно систем координат
. Положение материальной точки р, обладающей масcой m, относительно систем координат  и задается векторами r и r * соответственно. Положение точки О* в системе координат определяется вектором h.
и задается векторами r и r * соответственно. Положение точки О* в системе координат определяется вектором h.
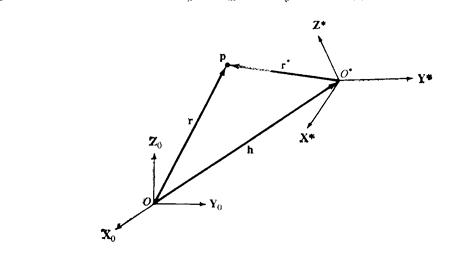
Рисунок 12.1. Подвижная система координат
Соотношения между векторами r и r* даётся выражением (см. рис. 12.1):
 . (12-1)
. (12-1)
Если система координат движется относительно системы , то:
 , (12-2)
, (12-2)
где  и
и  - скорости точки р в системах координат и соответственно, а
- скорости точки р в системах координат и соответственно, а  - скорость точки 0* в системе координат
- скорость точки 0* в системе координат  .
.
С учетом равенства (11-13) выражение (12-2) представим:
 . (12-3)
. (12-3)
Аналогично ускорение точки р в системе координат :
 , (12-4)
, (12-4)
где  и
и  - ускорения точки р в системах координат и соответственно, а
- ускорения точки р в системах координат и соответственно, а  - ускорение системы координат в инерциальной системе координат .
- ускорение системы координат в инерциальной системе координат .
С учетом (11-14) равенство (12-4) можно представить в виде:
 . (12-5)
. (12-5)
Полученные соотношения для подвижных систем координат применима к системам координат звеньев манипулятора.
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 729; Нарушение авторских прав?; Мы поможем в написании вашей работы!