КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Присоединенных переменных
|
|
|
|
Сглаженные траектории в пространстве
Планирование сглаженных траекторий в пространстве присоединенных переменных следует проводить с учетом следующих соображений:
1) В момент поднятия объекта манипулирования движение схвата должно быть направлено от объекта;
2) Допустимое движение ухода задается на нормали к поверхности, на которой расположен объект, траектория схвата должна проходить через эту точку.
3) Для участка подхода к заданному конечному положению: схват должен пройти через точку подхода, расположенную на нормали к поверхности, на которую должен быть помещен объект манипулирования.
4) Траектория движения манипулятора должна проходить через четыре заданные точки: начальную точку, точку ухода, точку подхода и конечную точку (рис. 9.2).
5) На траекторию накладываются условия:
a. начальная точка: заданы скорость и ускорение (обычно нулевые);
b. точки ухода: непрерывность положения, скорости и ускорения;
c. точка подхода: непрерывность положения, скорости и ускорения;
d. конечная точка: заданы скорость и ускорение (обычно нулевые).
6) Значения присоединенных координат должны лежать в пределах физических и геометрических ограничений каждого из сочленений манипулятора.
7) При определении времени движения необходимо учесть:
a. время прохождения начального и конечного участков траектории выбираются с учетом требуемой скорости подхода и ухода схвата, и представляет собой некоторую константу, зависящую от характеристик силовых приводов сочленений
b. время движения по среднему участку траектории определяется максимальными значениями присоединенных скоростей и ускорений каждого сочленения.
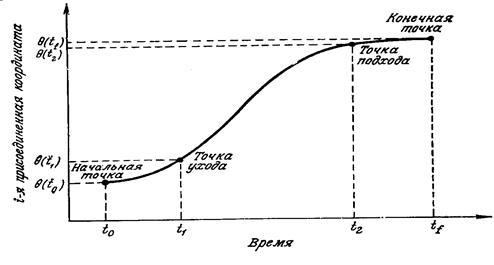
Рисунок 14.2. Ограничения по положению для траектории в пространстве присоединенных переменных
Для проведения интерполяции траектории по заданным узловым точкам нужно выбрать полиномную функцию степени не выше n.
Например, описание i –го сочленения полиномом седьмой степени:
 , (14-1)
, (14-1)
в котором неизвестные коэффициенты  определяются из заданных граничных условий и условий непрерывности. Однако полином такой высокой степени трудно вычислить. Нужно разбить траекторию движения на несколько участков и интерполировать каждый участок полиномом низкой степени.
определяются из заданных граничных условий и условий непрерывности. Однако полином такой высокой степени трудно вычислить. Нужно разбить траекторию движения на несколько участков и интерполировать каждый участок полиномом низкой степени.
Например, траектория изменения каждой присоединенной переменной разбивается на три участка (4-3-4). Первый участок, задающий движение между начальной точкой и точкой ухода, описывается полиномом четвертой степени. Второй (средний) участок – между точкой ухода и точкой подхода – описывается полиномом третьей степени. Последний участок – полиномом четвертой степени.
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 524; Нарушение авторских прав?; Мы поможем в написании вашей работы!