КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Равномерное и Равнопеременное вращения
|
|
|
|
.
Рис.5
Перейдем в этом равенстве от векторов к их проекциям на оси  , проведенные в точке М (рис.5). Тогда на основании теоремы о проекции суммы (или разности) векторов на ось получим:
, проведенные в точке М (рис.5). Тогда на основании теоремы о проекции суммы (или разности) векторов на ось получим:
 .
.
Учитывая, что проекция вектора на параллельные оси одинаковы, проведем через точку М1 оси  параллельные
параллельные  и обозначим угол между направлением вектора
и обозначим угол между направлением вектора  и касательной
и касательной  через
через  . Этот угол между касательными к кривой в точках М и М1 называется углом смежности.
. Этот угол между касательными к кривой в точках М и М1 называется углом смежности.
Напомним, что предел отношения угла смежности к длине дуги  определяет кривизну k кривой в точке М. Кривизна же является величиной, обратной радиусу кривизны
определяет кривизну k кривой в точке М. Кривизна же является величиной, обратной радиусу кривизны  в точке М. Таким образом,
в точке М. Таким образом,
 .
.
Обращаясь теперь к чертежу (рис.6), находим, что проекции векторов  и на оси
и на оси  будут равны:
будут равны: 
 ,
,
где v и v1 - численные величины скорости точки в моменты t и t1.
Следовательно,
 .
.
Заметим что при  точка М1 неограниченно приближается к М и одновременно
точка М1 неограниченно приближается к М и одновременно  .
.
Тогда, учитывая, что в пределе  , получим для
, получим для  выражение
выражение
 .
.
Правую часть выражения аn преобразуем так, чтобы в нее вошли отношения, пределы которых нам известны. Для этого умножим числитель и знаменатель дроби, стоящей под знаком предела, на  . Тогда будем иметь
. Тогда будем иметь
 ,
,
так как пределы каждого из стоящих в скобке сомножителей при равны:

Окончательно получаем:
 .
.
Итак, мы доказали, что проекция ускорения точки на касательную равна первой производной от численной величины скорости или второй производной от расстояния (криволинейной координаты) s no времени, а проекция ускорения на главную нормаль равна квадрату скорости деленному на радиус кривизны траектории в данной точке кривой; проекция ускорения на бинормаль равна нулю (аb=0). Эти результаты выражают собою одну из важных теорем кинематики точки.
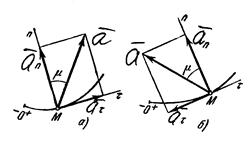
Рис.6
Отложим вдоль касательной и главной нормали Мп векторы  и
и  , численно равные и an (рис. 6). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая будет всегда направлена в сторону вогнутости кривой (величина a„ всегда положительна), а составляющая может быть направлена или в положительном, или в отрицательном направлении оси в зависимости от знака проекции (см. рис. 6, а и б).
, численно равные и an (рис. 6). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая будет всегда направлена в сторону вогнутости кривой (величина a„ всегда положительна), а составляющая может быть направлена или в положительном, или в отрицательном направлении оси в зависимости от знака проекции (см. рис. 6, а и б).
Вектор ускорения точки  изображается диагональю параллелограмма, построенного на составляющих и . Так как эти составляющие взаимно перпендикулярны, то по модулю:
изображается диагональю параллелограмма, построенного на составляющих и . Так как эти составляющие взаимно перпендикулярны, то по модулю:
 .
.
Некоторые частные случаи движения точки.
Пользуясь полученными результатами, рассмотрим некоторые частные случаи движения точки.
1) Прямолинейное движение. Если траекторией точки
является прямая линия, то  . Тогда
. Тогда  и все ускорение точки равно одному только касательному ускорению:
и все ускорение точки равно одному только касательному ускорению:
 .
.
Так как в данном случае скорость изменяется только численно, то отсюда заключаем, что касательное ускорение характеризует изменение скорости по численной величине.
2) Равномерное криволинейное движение. Равномерным называется такое криволинейное движение точки, в котором численная величина скорости все время остается постоянной:
v = const. Тогда  и все ускорение точки равно одному только нормальному:
и все ускорение точки равно одному только нормальному:
 .
.
Вектор ускорения направлен при этом все время по нормали к траектории точки.
Так как в данном случае ускорение появляется только за счет изменения направления скорости, то отсюда заключаем, что нормальное ускорение характеризует изменение скорости по направлению. Найдем закон равномерного криволинейного движения.
Из формулы  имеем
имеем  .
.
Пусть в начальный момент (t=0) точка находится от начала отсчета на расстоянии s0. Тогда, беря от левой и правой части равенства определенные интегралы в соответствующих пределах, получим
 или
или  ,
,
так как v=const. Окончательно находим закон равномерного криволинейного движения в виде
 .
.
Если s0=0, то s даст путь, пройденный точкой за время t. Следовательно, при равномерном движении путь, пройденный точкой, расчет пропорционального времени, а скорость движения равна отношению пути ко времени
 .
.
3) Равномерное прямолинейное движение. В этом случае  , а значит и а=0. Заметим, что единственным движением, в котором ускорение точки все время равно нулю, является равномерное прямолинейное движение.
, а значит и а=0. Заметим, что единственным движением, в котором ускорение точки все время равно нулю, является равномерное прямолинейное движение.
4) Равнопеременное криволинейное движение. Равнопеременным называется такое криволинейное движение точки, при котором касательное ускорение остается все время величиною постоянной:  . Найдем закон этого движения, считая, что при t=0
. Найдем закон этого движения, считая, что при t=0
s=s0, а v=v0, где v0 - начальная скорость точки. Согласно формуле  имеем
имеем  .
.
Так как , то, беря от обеих частей последнего равенства интегралы в соответствующих пределах, получим:
 .
.
Формулу представим в виде
 или
или  .
.
Вторично интегрируя, найдем закон равнопеременного криволинейного движения точки в виде
 .
.
Если при криволинейном движении точки модуль скорости возрастает, то движение называется ускоренным, а если убывает - замедленным.
ЛЕКЦИЯ 6
Поступательное и вращательное движения твердого тела
Поступательное движение
В кинематике, как и в статистике, будем рассматривать все твердые тела как абсолютно твердые. Задачи кинематики твердого тела распадаются на две части:
1)задание движения и определение кинематических характеристик движения тела в целом;
2) определение кинематических характеристик движения отдельных точек тела.
Начнем с рассмотрения поступательного движения твердого тела.
Поступательным называется такое движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается, оставаясь параллельной своему начальному направлению.
Поступательное движение не следует смешивать с прямолинейным. При поступательном движении тела траектории его точек могут быть любыми кривыми линиями. Приведем примеры.
1. Кузов автомобиля на прямом горизонтальном участке дороги движется поступательно. При этом траектории его точек будут прямыми линиями.
2. Спарник АВ (рис. 7) при вращении кривошипов О1А и О2В (О1А и О2В) также движется поступательно (любая проведенная в нем прямая остается параллельной ее начальному направлению). Точки спарника движутся при этом по окружностям.
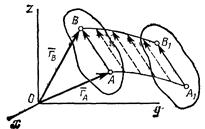
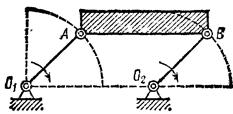
Рис.7 Рис.8
Свойства поступательного движения определяются следующей теоремой: при
поступательном движении все точки тела описывают одинаковые (при наложении
совпадающие) траектории и имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения.
Для доказательства рассмотрим твердое тело, совершающее поступательное движение относительно системы отсчета Oxyz. Возьмем в теле две произвольные точки А и В, положения которых в момент времени t определяются радиусами-векторами  и
и  (рис. 8).
(рис. 8).
Проведем вектор  , соединяющий эти точки. Тогда
, соединяющий эти точки. Тогда
 .
.
При этом длина АВ постоянна, как расстояние между точками твердого тела, а направление АВ остается неизменным, так как тело движется поступательно. Таким образом, вектор АВ во все время движения тела остается постоянным (АВ=сопst). Вследствие этого, траектория точки В получается из траектории точки А параллельным смещением всех ее точек на постоянный вектор . Следовательно, траектории точек А и В будут действительно одинаковыми (при наложении совпадающими) кривыми.
Для нахождения скоростей точек А и В продифференцируем обе части равенства по времени. Получим
 .
.
Но производная от постоянного вектора АВ равна нулю. Производные же от векторов rA и rB по времени дают скорости точек А и В. В результате находим, что
 ,
,
т. е. что скорости точек А и В тела в любой момент времени одинаковы и по модулю, и по направлению. Беря от обеих частей полученного равенства производные по времени:
 или
или  .
.
Следовательно, ускорения точек А и В тела в любой момент времени тоже одинаковы по модулю и направлению.
Так как точки А и В были выбраны произвольно, то из найденных результатов следует, что у всех точек тела их траектории, а также скорости и ускорения в любой момент времени будут одинаковы. Таким образом, теорема доказана.
Из теоремы следует, что поступательное движение твердого тела определяется движением какой-нибудь одной из его точки. Следовательно, изучение поступательного движения тела сводится к задаче кинематике точки, нами уже рассмотренной.
При поступательном движении общую для всех точек тела скорость называют скоростью поступательного движения тела, а ускорение - ускорением поступательного движения тела. Векторы и можно изображать приложенными в любой точке тела.
Заметим, что понятие о скорости и ускорении тела имеют смысл только при поступательном движении. Во всех остальных случаях точки тела, как мы увидим, движутся с разными скоростями и ускорениями, и термины <<скорость тела>> или <<ускорение тела>> для этих движений теряют смысл.
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ ОСИ. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ
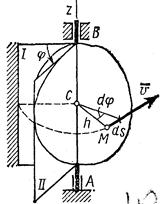
Вращательным движением твердого тела вокруг неподвижнойосиназывается такое его движение, при котором какие-нибудь две точки, принадлежащие телу (или неизменно с ним связанные), остаются во все время движения неподвижными (рис. 10).
Проходящая через неподвижные точки А и В прямая А В называется осью вращения.
Так как расстояния между точками твердого тела должны оставаться неизменными, то очевидно, что при вращательном движении все точки, принадлежащие оси вращения, будут неподвижны, а все остальные точки тела будут описывать окружности, плоскости которых перпендикулярны оси вращения, а центры лежат на этой оси.
Для определения положения вращающегося тела проведем через ось вращения, вдоль которой направим ось АZ, полуплоскость - неподвижную и полуплоскость  , врезанную в само тело и вращающуюся вместе с ним (см. рис. 9). Тогда положение тела в любой момент времени однозначно определится взятым с соответствующим знаком углом
, врезанную в само тело и вращающуюся вместе с ним (см. рис. 9). Тогда положение тела в любой момент времени однозначно определится взятым с соответствующим знаком углом  между этими полуплоскостями, который назовем углом поворота тела. Будем считать угол положительным, если он отложен от неподвижной плоскости в направлении против хода часовой стрелки (для наблюдателя, смотрящего с положительного конца оси АZ), и отрицательным,
между этими полуплоскостями, который назовем углом поворота тела. Будем считать угол положительным, если он отложен от неподвижной плоскости в направлении против хода часовой стрелки (для наблюдателя, смотрящего с положительного конца оси АZ), и отрицательным,
 если по ходу часовой стрелки. Измерять угол будем всегда
если по ходу часовой стрелки. Измерять угол будем всегда
в радианах. Чтобы знать положение тела в любой момент времени,
надо знать зависимость угла от времени t, т. е.
 .
.
Уравнение выражает закон вращательного движения твердого
тела вокруг неподвижной оси.
Основными кинематическими характеристиками вращательного
движения твердого тела являются его угловая скорость  и
и
угловое ускорение  .
.
Если за промежуток времени  тело совершает.
тело совершает.
поворот на угол  , то численно средней угловой Рис.9
, то численно средней угловой Рис.9
скоростью тела за этот промежуток времени будет  . В пределе при найдем, что
. В пределе при найдем, что
 или
или  .
.
Таким образом, числовое значение угловой скорости тела в данный момент времени равно первой производной от угла поворота по времени. Знак определяет направление вращения тела. Легко видеть, что когда вращение происходит против хода часовой стрелки, >0, а когда по ходу часовой стрелки, то <О.
Размерность угловой скорости 1/Т (т. е. 1/время); в качестве единицы измерения обычно применяют рад/с или, что то же, 1/с (с-1), так как радиан - величина безразмерная.
Угловую скорость тела можно изобразить в виде вектора  , модуль которого равен | | и который направлен вдоль оси вращения тела в ту сторону, откуда вращение видно происходящим против хода часовой стрелки (рис.11). Такой вектор определяет сразу и модуль угловой скорости, и ось вращения, и направление вращения вокруг этой оси.
, модуль которого равен | | и который направлен вдоль оси вращения тела в ту сторону, откуда вращение видно происходящим против хода часовой стрелки (рис.11). Такой вектор определяет сразу и модуль угловой скорости, и ось вращения, и направление вращения вокруг этой оси.
Угловое ускорение характеризует изменение с течением времени угловой скорости тела. Если за промежуток времени угловая скорость тела изменяется на величину  , то числовое значение среднего углового ускорения тела за этот промежуток времени будет
, то числовое значение среднего углового ускорения тела за этот промежуток времени будет  . В пределе при найдем,
. В пределе при найдем,
 или
или  .
.
Таким образом, числовое значение углового ускорения, тела в данный момент времени равно первой производной от угловой скорости или второй производной от угла поворота тела по времени.
Размерность углового ускорения 1/T2 (1/время2); в качестве единицы измерения обычно применяется рад/с2 или, что то же, 1/с2 (с-2).
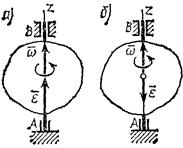
Рис.10
Если модуль угловой скорости со временем возрастает, вращение тела называется ускоренным, а если убывает, - замедленным. Легко видеть, что вращение будет ускоренным, когда величины и имеют одинаковые знаки, и замедленным, - когда разные.
Угловое ускорение тела (по аналогии с угловой скоростью) можно также изобразить в виде вектора , направленного вдоль оси вращения. При этом
 .
.
Направление совпадает с направлением , когда тело вращается ускоренно и (рис.10,а), противоположно при замедленном вращении (рис.10,б),
Если угловая скорость тела остается во все время движения постоянной ( =const), то вращение тела называется равномерным. Найдем закон равномерного вращения. Из формулы имеем  .
.
Отсюда, считая, что в начальный момент времени t=0 угол  , и беря интегралы слева от
, и беря интегралы слева от  до , а справа от 0 до t, получим окончательно
до , а справа от 0 до t, получим окончательно
 .
.
Из равенства следует, что при равномерном вращении, когда 
 и
и  .
.
В технике скорость равномерного вращения часто определяют числом оборотов в минуту, обозначая эту величину через n об/мин. Найдем зависимость между n об/мин и 1/с. При одном обороте тело повернется на угол  , а при n оборотах на
, а при n оборотах на  ; этот поворот делается за время t=1 мин= 60 с. Из равенства следует тогда, что
; этот поворот делается за время t=1 мин= 60 с. Из равенства следует тогда, что
 .
.
Если угловое ускорение тела во все время движения остается постоянным  , то вращение называется равнопеременным. Найдем закон равнопеременного вращения, считая, что в начальный момент времени t=0 угол , а угловая скорость = 0 ( 0 - начальная угловая скорость).
, то вращение называется равнопеременным. Найдем закон равнопеременного вращения, считая, что в начальный момент времени t=0 угол , а угловая скорость = 0 ( 0 - начальная угловая скорость).
Из формулы  имеем
имеем  . Интегрируя левую часть в пределах от 0 до , а правую - в пределах от 0 до t, найдем
. Интегрируя левую часть в пределах от 0 до , а правую - в пределах от 0 до t, найдем
 ,
,
 или
или  .
.
Вторично интегрируя, найдем отсюда закон равнопеременного вращения
 .
.
Если величины и имеют одинаковые знаки, то вращение будет равноускоренным, а если разные - равнозамедленным.
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 718; Нарушение авторских прав?; Мы поможем в написании вашей работы!