КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Цилиндрические зубчатые передачи
|
|
|
|
Рассмотрим основные виды этих передач.
1. Рядовой назовем передачу, в которой все оси колес, находящихся в последовательном зацеплении, неподвижны. При этом одно из колес (например, колесо 1 на рис.31) является ведущим, а остальные ведомыми.
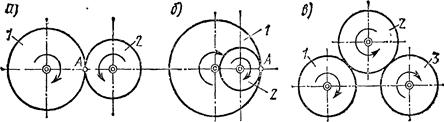
Рис.31
В случае внешнего (рис. 31, а) или внутреннего (рис. 31, б) зацепления двух колес имеем  , так как скорость точки сцепления А у обоих колес одинакова. Учитывая, что число z зубцов сцепленных колес пропорционально их радиусам, а вращения колес происходят при внутреннем зацеплении в одну сторону, а при внешнем в разные, получаем
, так как скорость точки сцепления А у обоих колес одинакова. Учитывая, что число z зубцов сцепленных колес пропорционально их радиусам, а вращения колес происходят при внутреннем зацеплении в одну сторону, а при внешнем в разные, получаем
 .
.
При внешнем зацеплении трех колес (рис. 32, в) найдем, что
 и
и  .
.
Следовательно, отношение угловых скоростей крайних шестерен в этой передаче обратно пропорционально их радиусам (числу зубцов) и не зависит от радиусов промежуточных (паразитных) шестерен.
Из полученных результатов следует, что при рядовом сцеплении шестерен
 .
.
где k - число внешних зацеплений (в случае, изображенном на рис.31,а имеется одно внешнее зацепление; на рис.31, в - два внешних зацепления, на рис.31, б внешних зацеплений нет).
Передаточным числом данной зубчатой передачи называется величина  , дающая отношение угловой скорости ведущего колеса к угловой скорости ведомого:
, дающая отношение угловой скорости ведущего колеса к угловой скорости ведомого:
 .
.
2. Планетарной называется передача (рис.32), в которой шестерня 1 неподвижна, а оси остальных шестерен, находящихся в последовательном зацеплении, укреплены на кривошипе АВ, вращающемся вокруг оси неподвижной шестерни.
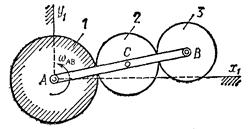
Рис.32
3. Дифференциальной называется передача, изображенная на рис. 32, если в ней шестерня 1 не является неподвижной и может вращаться вокруг своей оси А независимо от кривошипа АВ.
Расчет планетарных и дифференциальных передач можно производить, сообщив мысленно всей неподвижной плоскости Ах1y1 вращение с угловой скоростью -  AB, равной по модулю и противоположной по направлению угловой скорости кривошипа АВ (метод остановки или метод Виллиса).
AB, равной по модулю и противоположной по направлению угловой скорости кривошипа АВ (метод остановки или метод Виллиса).
Тогда кривошип в этом сложном движении будет неподвижен, а любая шестерня радиуса rk будет иметь угловую скорость
где k - абсолютная угловая скорость этой шестерни по отношению к осям Ах1y1 (рис.32). При этом оси всех шестерен будут неподвижны и зависимость между  можно будет определить приравнивая скорости точек сцепления.
можно будет определить приравнивая скорости точек сцепления.
Расчет планетарных и дифференциальных передач можно также производить с помощью мгновенных центров скоростей.
Сложение поступательного и вращательного движений. Винтовое движение.
Если сложное движение тела слагается из вращательного вокруг оси Аа с угловой скоростью  и поступательного со скоростью v, направленной параллельно оси Аа (рис.33), то такое движение тела называется винтовым. Ось Аа называют осью винта. Когда векторы v и направлены в одну сторону, то при принятом нами правиле изображения винт будет правым; если в разные стороны, - левым.
и поступательного со скоростью v, направленной параллельно оси Аа (рис.33), то такое движение тела называется винтовым. Ось Аа называют осью винта. Когда векторы v и направлены в одну сторону, то при принятом нами правиле изображения винт будет правым; если в разные стороны, - левым.
Расстояние, проходимое за время одного оборота любой точкой тела, лежащей на оси винта, называется шагом h винта. Если величины v и постоянны, то шаг винта также будет постоянным. Обозначая время одного оборота через Т, получаем в этом случае vT=h и T=2  , откуда h=2 v/ .
, откуда h=2 v/ .
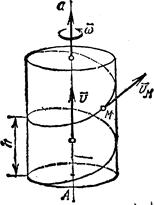
Рис.33
При постоянном шаге любая точка М тела, не лежащая на оси винта, описывает винтовую линию. Скорость точки М, находящейся от оси винта на расстоянии r, слагается из поступательной скорости v и перпендикулярной ей скорости, получаемой во вращательном движении, которая численно равна  . Следовательно,
. Следовательно,
 .
.
Направлена скорость  по касательной к винтовой линии. Если цилиндрическую поверхность, по которой движется точка М, разрезать вдоль образующей и развернуть, то винтовые линии, обратятся в прямые, наклоненные к основанию цилиндра под углом
по касательной к винтовой линии. Если цилиндрическую поверхность, по которой движется точка М, разрезать вдоль образующей и развернуть, то винтовые линии, обратятся в прямые, наклоненные к основанию цилиндра под углом 
 .
.
Рекомендуемая литература
1. Яблонский А.А. Курс теоретической механики. Т. 1,2. - М.: Высш. шк., 1977.
2. Добронравов В.В., Никитин Н.Н. Курс теоретической механики. - М.,1980.
3. Тарг С.М. Краткий курс теоретической механики. - М.: Высш. шк., 1986.
4. Лойцянский Л.Г., Лурье А.И. Курс теоретической механики. Т.1,2. - М., 1982.
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 385; Нарушение авторских прав?; Мы поможем в написании вашей работы!