КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Решение задач на скорости
|
|
|
|
Изучение данных вопросов необходимо в дальнейшем для динамики плоского движения твердого тела, динамики относительного движения материальной точки, для решения задач в дисциплинах «Теория машин и механизмов» и «Детали машин».
Плоскопараллельное движение твердого тела
Уравнения плоскопараллельного движения
Разложение движения на поступательное и вращательное
Плоскопараллельным (или плоским) называется такое движение твердого тела, при, котором все его точки перемещаются параллельно некоторой фиксированной плоскости П (рис. 15). Плоское движение совершают многие части механизмов и машин, например катящееся колесо на прямолинейном участке пути, шатун в кривошипно-ползунном механизме и др. Частным случаем плоскопараллельного движения является вращательное движение твердого тела вокруг неподвижной оси.
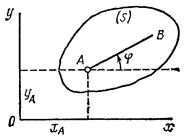
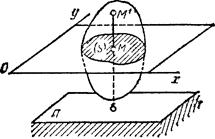
Рис.15 Рис.16
Рассмотрим сечение S тела какой-нибудь плоскости Оxy, параллельной плоскости П (рис.15). При плоскопараллельном движении все точки тела, лежащие на прямой ММ, перпендикулярной течению S, т. е. плоскости П, движутся тождественно.
Отсюда заключаем, что для изучения движения всего тела достаточно изучить, как движется в плоскости Оху сечение S этого тела или некоторая плоская фигура S. Поэтому в дальнейшем вместо плоского движения тела будем рассматривать движение плоской фигуры S в ее плоскости, т. е. в плоскости Оху.
Положение фигуры S в плоскости Оху определяется положением какого-нибудь проведенного на этой фигуре отрезка АВ (рис. 17). В свою очередь положение отрезка АВ можно определить, зная координаты ха, уа точки А и угол  , который отрезок АВ образует с осью х. Точку А, выбранную для определения положения фигуры S, будем в дальнейшем называть полюсом.
, который отрезок АВ образует с осью х. Точку А, выбранную для определения положения фигуры S, будем в дальнейшем называть полюсом.
При движении фигуры величины ха, уА и будут изменяться. Чтобы знать закон движения, т. е. положение фигуры в плоскости Оху в любой момент времени, надо знать зависимости
 .
.
Уравнения, определяющие закон происходящего движения, называются уравнениями движения плоской фигуры в ее плоскости. Они же являются уравнениями плоскопараллельного движения твердого тела
Первые два из уравнений движения определяют то движение, которое фигура совершала бы при =const; это, очевидно, будет поступательное движение, при котором все точки фигуры движутся так же, как полюс А. Третье уравнение определяет движение, которое фигура совершала бы при  и
и  , т. е. когда полюс А неподвижен; это будет вращение фигуры вокруг полюса Л. Отсюда можно заключить, что в общем случае движение плоской фигуры в ее плоскости может рассматриваться как слагающееся из поступательного движения, при котором все точки фигуры движутся так же, как полюс А, и из вращательного движения вокруг этого полюса.
, т. е. когда полюс А неподвижен; это будет вращение фигуры вокруг полюса Л. Отсюда можно заключить, что в общем случае движение плоской фигуры в ее плоскости может рассматриваться как слагающееся из поступательного движения, при котором все точки фигуры движутся так же, как полюс А, и из вращательного движения вокруг этого полюса.
Основными кинематическими характеристиками рассматриваемого движения являются скорость и ускорение поступательного движения, равные скорости и ускорению полюса  , а также угловая скорость
, а также угловая скорость  и угловое ускорение
и угловое ускорение  вращательного движения вокруг полюса.
вращательного движения вокруг полюса.
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ
Было отмечено, что движение плоской фигуры можно рассматривать как слагающееся из поступательного движения, при котором все точки фигуры движутся со скоростью vA полюса А, и из вращательного движения вокруг этого полюса. Покажем, что скорость любой точки М фигуры складывается геометрически из скоростей, которые точка получает в каждом из этих движений.
В самом деле, положение любой точки М фигуры определяется по отношению к осям Оху радиусом-вектором  (рис. 18), где
(рис. 18), где  - радиус-вектор полюса А,
- радиус-вектор полюса А,  - вектор, определяющий положение точки М относительно осей Аху', перемещающихся вместе с полюсом А поступательно (движение фигуры по отношению к этим осям представляет собой вращение вокруг полюса А). Тогда
- вектор, определяющий положение точки М относительно осей Аху', перемещающихся вместе с полюсом А поступательно (движение фигуры по отношению к этим осям представляет собой вращение вокруг полюса А). Тогда
 .
.
В полученном равенстве величина  есть скорость полюса А; величина же dr'/dt равна скорости
есть скорость полюса А; величина же dr'/dt равна скорости  , которую точка М получает при =const, т. е. относительно осей Ax'y', или, иначе говоря, при вращении фигуры вокруг полюса А. Таким образом, из предыдущего равенства действительно следует, что
, которую точка М получает при =const, т. е. относительно осей Ax'y', или, иначе говоря, при вращении фигуры вокруг полюса А. Таким образом, из предыдущего равенства действительно следует, что
 .
.
Скорость , которую точка М получает при вращении фигуры вокруг полюса А:

 ,
,
где - угловая скорость фигуры.
Таким образом, скорость любой точки М плоской фигуры геометрически складывается из скорости какой-нибудь другой точки А, принятой за полюс, и скорости, которую точка М получает при вращении фигуры вокруг этого полюса. Модуль и направление скорости  находятся построением соответствующего параллелограмма (рис.18).
находятся построением соответствующего параллелограмма (рис.18).
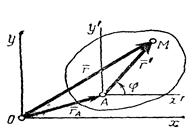

Рис.17 Рис.18
ТЕОРЕМА О ПРОЕКЦИЯХ СКОРОСТЕЙ ДВУХ ТОЧЕК ТЕЛА
Определение скоростей точек плоской фигуры (или тела, движущегося плоскопараллельно) связано обычно с довольно сложными расчетами. Однако можно получить ряд других, практически более удобных и простых методов определения скоростей точек фигуры (или тела).
 Один из таких методов дает теорема: проекции скоростей двух точек твердого тела на ось, проходящую через эти точки, равны друг другу. Рассмотрим какие-нибудь две точки А и В плоской фигуры (или тела). Принимая точку А за полюс (рис.19), получаем
Один из таких методов дает теорема: проекции скоростей двух точек твердого тела на ось, проходящую через эти точки, равны друг другу. Рассмотрим какие-нибудь две точки А и В плоской фигуры (или тела). Принимая точку А за полюс (рис.19), получаем  . Отсюда, проектируя обе части равенства на ось, направленную по АВ, и учитывая, что вектор
. Отсюда, проектируя обе части равенства на ось, направленную по АВ, и учитывая, что вектор  перпендикулярен АВ, находим
перпендикулярен АВ, находим

и теорема доказана.
Рис.19
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ С ПОМОЩЬЮ МГНОВЕННОГО ЦЕНТРА СКОРОСТЕЙ
Другой простой и наглядный метод определения скоростей точек плоской фигуры (или тела при плоском движении) основан на понятии о мгновенном центре скоростей.
Мгновенным центром скоростей называется точка плоской фигуры, скорость которой в данный момент времени равна нулю.
Легко убедиться, что если фигура движется непоступательно,
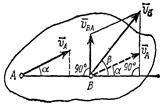
то такая точка в каждый момент времени t существует и притом единственная. Пусть в
момент времени t точки А и В плоской фигуры имеют скорости  и
и  , не параллельные друг другу (рис.20). Тогда точка Р, лежащая на пересечении перпендикуляров Аа вектору га и ВЬ к вектору vB, и будет мгновенным центром скоростей так как Vp=0. В самом деле, если допустить, что Vp=0, то по теореме о проекциях скоростей вектор Vp должен быть одновременно перпендикулярен и АР, (так как
, не параллельные друг другу (рис.20). Тогда точка Р, лежащая на пересечении перпендикуляров Аа вектору га и ВЬ к вектору vB, и будет мгновенным центром скоростей так как Vp=0. В самом деле, если допустить, что Vp=0, то по теореме о проекциях скоростей вектор Vp должен быть одновременно перпендикулярен и АР, (так как  ) и ВР (так как
) и ВР (так как  ), что невозможно. Из той же теоремы видно, что никакая другая точка фигуры в этот момент времени не может иметь скорость, равную нулю.
), что невозможно. Из той же теоремы видно, что никакая другая точка фигуры в этот момент времени не может иметь скорость, равную нулю.
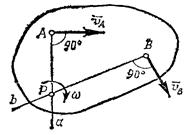
Рис.20
Если теперь в момент времени t взять точку Р за полюс, то скорость точки А будет
 ,
,
так как Vp=0. Аналогичный результат получается для любой другой точки фигуры. Следовательно, скорости точек плоской фигуры определяются в данный момент времени так, как если бы движение фигуры было вращением вокруг мгновенного центра скоростей. При этом
 ,
,  и т.д.
и т.д.
Из равенств, следует еще, что

т.е. что скорости точек плоской фигуры пропорциональны их расстояниям от МЦС.
Полученные результаты приводят к следующим выводам.
1. Для определения мгновенного центра скоростей надо знать только направления скоростей  и
и  каких-нибудь двух точек А и В плоской фигуры (или траектории этих точек); мгновенный центр скоростей находится в точке пересечения перпендикуляров, восставленных из точек А и В к скоростям этих точек (или к касательным к траекториям).
каких-нибудь двух точек А и В плоской фигуры (или траектории этих точек); мгновенный центр скоростей находится в точке пересечения перпендикуляров, восставленных из точек А и В к скоростям этих точек (или к касательным к траекториям).
2. Для определения скорости любой точки плоской фигуры, надо знать модуль и направление скорости какой-нибудь одной точки А фигуры и направление скорости другой ее точки В. Тогда, восставив из точек А и В перпендикуляры к и , построим мгновенный центр скоростей Р и по направлению определим направление поворота фигуры. После этого, зная vА, найдем скорость vМ любой точки М плоской фигуры. Направлен вектор  перпендикулярно РМ в сторону поворота фигуры.
перпендикулярно РМ в сторону поворота фигуры.
3. Угловая скорость плоской фигуры равна в каждый данный момент времени отношению скорости какой-нибудь точки фигуры к ее расстоянию от мгновенного центра скоростей Р:
 .
.
Рассмотрим некоторые частные случаи определения мгновенного центра скоростей.
а) Если плоскопараллельное движение осуществляется путем качения без скольжения одного цилиндрического тела по поверхности другого неподвижного, то точка Р катящегося тела, касающаяся неподвижной поверхности (рис.21), имеет в данный момент времени вследствие отсутствия скольжения скорость, равную нулю (uР=o), и, следовательно, является мгновенным центром скоростей. Примером служит качение колеса по рельсу.
б) Если скорости точек А и В плоской фигуры параллельны друг другу, причем линия АВ не перпендикулярна (рис.22,а), то мгновенный центр скоростей лежит в бесконечности и скорости всех точек параллельны . При этом из теоремы о проекциях скоростей следует, что  т. е.
т. е.  ; аналогичный результат получается для всех других точек. Следовательно, в рассматриваемом случае скорости всех точек фигуры в данный момент времени равны друг другу и по модулю, и по направлению, т. е. фигура
; аналогичный результат получается для всех других точек. Следовательно, в рассматриваемом случае скорости всех точек фигуры в данный момент времени равны друг другу и по модулю, и по направлению, т. е. фигура
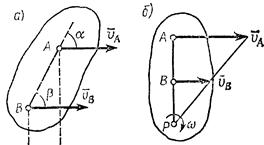
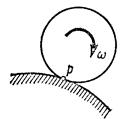
Рис.21 Рис.22
имеет мгновенное поступательное распределение скоростей (такое состояние движения тела называют еще мгновенно поступательным). Угловая скорость w тела в этот момент времени, как видно равна нулю.
в) Если скорости точек А и В плоской фигуры параллельны друг другу и при этом линия АВ перпендикулярна , то мгновенный центр скоростей Р определяется построением, показанным на рис. 22, б. Справедливость построений следует из пропорции. В этом случае, в отличие от предыдущих, для нахождения центра р надо кроме направлений знать еще и модули скоростей  и
и  .
.
г) Если известны вектор скорости какой-нибудь точки В фигуры и ее угловая скорость , то положение мгновенного центра скоростей Р, лежащего на перпендикуляре к (см.рис.22), можно найти как  .
.
Для определения искомых кинематических характеристик (угловой скорости тела или скоростей его точек) надо знать модуль и направление скорости какой-нибудь одной точки и направление скорости другой точки сечения этого тела. С определения этих характеристик по данным задачи и следует начинать решение.
Механизм, движение которого исследуется, надо изображать на чертеже в том положении, для которого требуется определить соответствующие характеристики. При расчете следует помнить, что понятие о мгновенном центре скоростей имеет место для данного твердого тела. В механизме, состоящем из нескольких тел, каждое непоступательное движущееся тело имеет в данный момент времени свой мгновенный цент скоростей Р и свою угловую скорость.
Определение ускорений точек плоской фигуры
Покажем, что ускорение любой точки М плоской фигуры (так же, как и скорость) складывается из ускорений, которые точка получает при поступательном и вращательном движениях этой фигуры. Положение точки м по отношению к осям ОXY (см.рис.17) определяется радиусом-вектором  где
где  . Тогда
. Тогда
 .
.
В правой части этого равенства первое слагаемое есть ускорение  полюса А, а второе слагаемое определяет ускорение
полюса А, а второе слагаемое определяет ускорение  , которое точка М получает при вращении фигуры вокруг полюса А. Следовательно,
, которое точка М получает при вращении фигуры вокруг полюса А. Следовательно,
 .
.
Значение , как ускоерния точки вращающегося твердого тела, определяется как
где и - угловая скорость и угловое ускорение фигуры, а  - угол между вектором
- угол между вектором  и отрезком МА (рис.23).
и отрезком МА (рис.23).
Таким образом, ускорение любой точки М плоской фигуры геометрически складывается из ускорения какой-нибудь другой точки А, принятой за полюс, и ускорения, которое точка М получает при вращении фигуры вокруг этого полюса. Модуль и направление ускорения  , находятся построением соответствующего параллелограмма (рис.23).
, находятся построением соответствующего параллелограмма (рис.23).
Однако вычисление аМ с помощью параллелограмма, изображенного на рис.23, усложняет расчет, так как предварительно надо будет находить значение угла , а затем - угла между векторами и , Поэтому при решении задач удобнее вектор заменять его касательной  и нормальной
и нормальной  составляющими и представить в виде
составляющими и представить в виде
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 408; Нарушение авторских прав?; Мы поможем в написании вашей работы!