КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дифференциальный метод
|
|
|
|
Методы определения ошибок механизмов
Всякий реальный механизм имеет погрешности (ошибки) звеньев и кинематических пар. Суммарные погрешности функционирования, приведенные к ведомому звену, являются результирующими. По величине ошибки положения или перемещения ведомого звена, ошибки мертвого хода оценивают точность механизма.
В теории точности механизмов рассматриваются и решаются две задачи. Первая или прямая задача заключается в определении суммарных ошибок положения и перемещения механизма или суммарной ошибки мертвого хода механизма по известным первичным ошибкам, лежащим в пределах допусков, зазоров. Вторая или обратная задача заключается в определении рациональных параметров, требований к точности изготовления и сборки деталей механизма по заданным величинам суммарных ошибок ведомого звена. Чаще рассматривают первую задачу. Существуют различные методы ее решения, в том числе аналитические, графоаналитические и графические. Рассмотрим некоторые из них.
Дифференциальный метод относится к аналитическим методам. Его сущность заключается в составлении уравнения, где положение ведомого рабочего звена механизма S выражено как функция некоторых параметров: координат ведущего звена x, y; размеров q1; положения звеньев q2 и т.п.
S = f (x, y, q1, q2, …, qn). (4.7)
Уравнение можно составить, проектируя размеры звеньев кинематической схемы механизма на оси прямоугольной системы координат или используя соотношения размеров сторон и углов в геометрических фигурах, являющихся контуром механизмов.
Параметры x, y, q1, q2, …, qn будем считать переменными, а их отклонения – первичными ошибками. Выражение полного дифференциала функции (4.7) будет равно  .
.
Представим его как ошибку положения механизма
 . (4.8)
. (4.8)
При Δx и Δy равных нулю выражение (4.8) примет вид
 , (4.9)
, (4.9)
где Δq1, Δq2,…, Δqn – первичные ошибки параметров q1, q2,…, qn.
Ошибка положения механизма определяется как сумма нескольких слагаемых – частных ошибок ΔSi, возникающих в результате действия отдельных первичных ошибок Δqi. Величина частной ошибки ΔSi зависит от величины первичной ошибки Δqi и коэффициента ее влияния ∂f / ∂qi. На основании принципа независимости действия ошибок i-ю частную ошибку ΔSi можно найти, взяв производную от функции положении (4.7) по i-му параметру, считая все остальные параметры постоянными.
Метод позволяет найти ошибку положения механизма независимо от ее причины, если есть функциональная связь между положением рабочего звена и параметрами, содержащими ошибки. При данном методе не учитываются (что является недостатком) первичные ошибки параметров, не вошедших в уравнение (4.7) механизма.
Пример. Пусть звено 1 (рис. 4.11) кривошипно-ползунного механизма является ведущим, а звено 3 – ведомым. Найдем ошибку положения механизма, т.е. погрешность положения ΔS звена 3, определяемого координатой S. Погрешность возникает из-за ошибок в размерах звеньев: звена 1 – Δr; звена 2 – Δℓ и ошибки эксцентриситета Δh. Положение ведущего звена соответствует положению такого же звена идеального механизма, т.е. Δφ = 0.
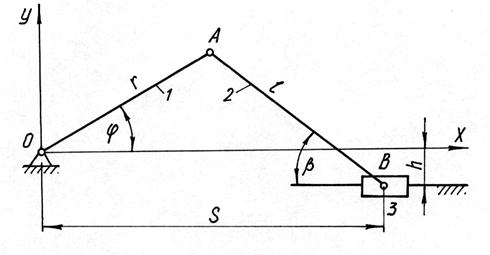
Рис. 4.11
Спроектируем план механизма на координатные оси x и y:
rcos φ + ℓcos β = S,
rsin φ + h = ℓsin β. (4.10)
Продифференцируем уравнения (4.10) по параметрам r, ℓ, h, S, β и, перейдя к первичным ошибкам параметров, получим
Δrcos φ + Δℓcos β – ℓΔβsin β = ΔS,
Δrsin φ + Δh = Δℓsin β + ℓΔβcos β. (4.11)
Погрешность угла Δβ является величиной неизвестной, возникающей из-за перечисленных выше первичных ошибок. Из второго уравнения (4.11) найдем Δβ:

и, подставив его в первое уравнение (4.11), получим
ΔS = Δrcos φ + Δℓcos β – ℓ sin β 
 (4.12)
(4.12)
Ошибку положения механизма можно представить как сумму частных погрешностей, возникающих от неточностей параметров r, ℓ, h, т.е.
как ΔS = ΔSr + ΔSℓ + ΔSh,
где 
 . (4.13)
. (4.13)
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 923; Нарушение авторских прав?; Мы поможем в написании вашей работы!