КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Мальтийские механизмы
|
|
|
|
Мальтийские механизмы служат для преобразования равномерного вращательного движения ведущего звена (кривошипа) в периодические повороты с остановками ведомого звена, креста. Эти механизмы в сочетании с зубчатыми передачами используют для прерывистого движения лент, в многопозиционных устройствах – автоматах и т.д.
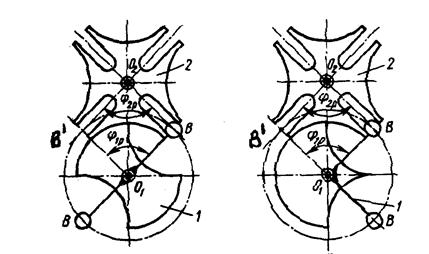
Различают два типа мальтийских механизмов: с внешним (рис. 17.1, а) и внутренним (рис. 17.1, б) зацеплениями. Чаще применяют механизмы внешнего зацепления.
При вращении кривошипа 1 (рис. 17.1, а) его палец (цевка) В входит в паз креста 2 и, поворачиваясь на угол j1р, поворачивает крест на рабочий угол j2р, после чего выходит из прорези. Вращение ведомого креста прекращается. Он остается неподвижным, пока кривошип не повернется на угол 2p – j1р до входа ведущей цевки в следующий паз креста.
|
|
|

Стопорение креста в неподвижном положении происходит с помощью секторного замка. Выпуклая цилиндрическая поверхность D диска входит в соприкосновение с вогнутой поверхностью Е креста и препятствует его повороту. Диск закреплен на кривошипе 1 в определенном положении и имеет вырез для прохода крестовин ведомого звена.
В механизме с внутренним зацеплением (рис. 17.1, б) кривошип 1 и крест 2 вращаются в одном направлении, отношение угла поворота кривошипа j¢1р к углу поворота креста j2р значительно больше, чем в механизме внешнего зацепления. Этот механизм может иметь только одну цевку. Механизмы с внутренним зацеплением являются конструктивно более сложными, но имеют меньшие габаритные размеры и меньшие угловые ускорения креста, т.е. меньшие динамические нагрузки.
Мальтийские механизмы внешнего зацепления могут иметь несколько цевок на кривошипе, что позволяет получить равные (рис. 17.2, а) и не равные (рис. 17.2, б) интервалы перемещений и остановов за один оборот ведущего звена.
Для обеспечения плавного, безударного вращения креста в начале и конце поворота направление линейной скорости пальца кривошипа в момент входа и выхода из паза должно совпадать с осью прорези. Это условие будет соблюдаться, если углы О1ВО2 и О1В¢О2 будут равны p/2.
Угол поворота креста j2р = 2p/z2, где z2 – число пазов креста.
Рассматривая четырехугольник О1ВО2В¢ (рис. 17.1, 17.2), получим
j1р = p 7 j2р или j1р= p  (17.1)
(17.1)
(здесь и далее верхний знак (–) – для внешнего зацепления, нижний (+) – для внутреннего).
|
|
|
Для мальтийского механизма с одной цевкой цикл соответствует одному обороту кривошипа. Время цикла tц состоит из времени поворота t2р креста и времени его покоя t2п. Отношение t2p/tц называют коэффициентом времени движения
kд = t2p/tц = j1р/2p = (z2  2)/(2 z2). (17.2)
2)/(2 z2). (17.2)
При kд = 1 крест вращается непрерывно, без остановок.
Из (17.2) следует, что при одной цевке (z1 = 1) коэффициент kд зависит только от числа пазов z2 креста. Анализируя зависимость (17.2) отметим, что прерывистое движение возможно, т.е. kд > 0 при числе пазов z2 ≥ 3. В механизме с внешним зацеплением при z2 = 2 коэффициент времени движения kд = 0. Наименьшее значение коэффициента kд при z2 = 3 равно 1/6.
При числе цевок z1 > 1 (внешнее зацепление) время цикла tц¢ = 2p/(w1z1) и коэффициент времени движения
kд = t2p/tц¢ = [(z2–2) z1]/(2z2) < 1. (17.3)
Из выражения (17.3) число цевок z1 и число пазов z2 креста должно находиться в следующей зависимости:
z1 < 2 z2/(z2 – 2). (17.4)
Например, при z2 = 4 число цевок должно быть меньше четырех, т.е. z1 может быть равно 1, 2 или 3.
При малом числе пазов выходное звено мальтийского механизма имеет плохие динамические характеристики. Например, при одинаковой скорости кривошипа максимальное угловое ускорение креста с тремя пазами в 45 раз больше, чем у восьмипазового креста. На практике чаще всего применяют механизмы с числом пазов 4, 6 и 8.
Мальтийские механизмы могут иметь несколько цевок на ведущем звене (рис. 17.3, а) или несколько ведомых звеньев (крестов) при одной цевке (рис. 17.3, б) с числом пазов в каждом более четырех. На рис. 17.3, б представлены шестипазовые мальтийские механизмы.
Исходными данными для расчета геометрических размеров элементов мальтийского механизма являются межосевое расстояние а, число пазов z2 = 3 … 12. Из условия, что угол О1ВО2 (см. рис. 17.2) равен p/2, выразим через межосевое расстояние а радиус кривошипа
r1 = O1B = a sin(j2р/2) = a sin(p/z2), (17.5)
и максимальный радиус креста
r2max = O2B = a cos(p/z2). (17.6)
|
|

Рис. 17.3
Ведомое звено (см. рис. 17.1, а) мальтийского механизма вращается с переменной скоростью. Скорость креста равна нулю в начале и конце поворота. Максимальную скорость w2max ведомое звено имеет при прохождении цевки через линию центров О1О2. Из равенства линейных скоростей в точке касания цевкой креста имеем
v1 = v2 или w1r1 = w2max × r2min, (17.7)
где r2min = а – r1 = a [1 – sin(p/z2)] – расстояние от оси вращения креста, т.е. точки О2 до цевки. Из выражения (17.7) имеем
 . (17.8)
. (17.8)
В этом положении угловое ускорение креста e2 равно 0, а в начальный и конечный моменты его движения e2 нач = w12 tg(p/z2); e2 кон = –w12 tg(p/z2).
Механизмы с мальтийским крестом работают плавно, без ударов в начале и конце поворота ведомого звена.
Ширину dп и длину ℓ пазов креста находим по формулам
dп = (0,2 … 0,4)r1; ℓ = r2max – r2min + 0,5 dп. (17.9)
Для обеспечения низкого коэффициента трения между пальцем кривошипа (цевкой) и рабочими поверхностями креста и высокой износоустойчивости этих элементов в качестве пальца применяют ролик или стандартный подшипник качения (рис. 17.4). Трение скольжения пальца о рабочие поверхности креста заменяется при этом трением качения. Обычный материал креста – сталь 40Х, пальца – ШХ15. Диаметр оси ролика пальца кривошипа d0 принимают (0,5 … 0,6) dп. Для уменьшения трения в зацеплении рабочие поверхности пазов и цевки обильно смазывают.
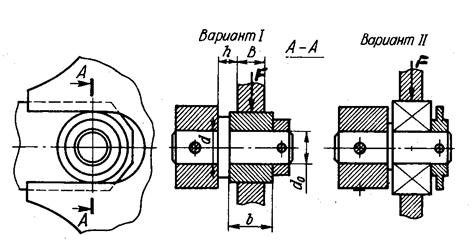
Рис. 17.4
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 4113; Нарушение авторских прав?; Мы поможем в написании вашей работы!