КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Характеристики вентильных двигателей
|
|
|
|
При обеспечении постоянной частоты питания систему ВД – регулятор мощности можно рассматривать как соединение преобра-зователя и СД без получения каких – либо новых свойств. В этом случае система приобретает независимость угловой скорости вращения от нагрузки. При сохранении неизменным потока возбуждения значение МЭ определяется только углом нагрузки θ, предельное значение которого соответствует максимальному значению МЭ; превышение этого значения приводит к выпадению двигателя из синхронизма.
Особенность ВД как элемента системы автоматизированного ЭП проявляется тогда, когда частота питающего тока от регулятора мощнос-ти ставится в зависимость от положения ротора. Вращение ротора при-водит к наведению в обмотках ЭДС вращения, которая, как известно, пропорциональна скорости вращения ротора ω и потоку Ф0. Форму кривой ЭДС вращения в первом приближении можно считать синусои-дальной. ЭДС вращения ВД, как и ЭДС коллекторных и СД, стремится скомпенсировать подведенное к якорю напряжение. Очевидно, что при увеличении напряжения увеличивается компенсирующая его ЭДС, сле-довательно, возрастает скорость вращения ротора. Отсюда вытекает пер-вый способ регулирования скорости вращения – изменением питаю-щего напряжения. Второй способ регулирования ω основан на умень-шении значения Фо (например, с помощью тока ОВ, если таковая имеется). При этом для поддержания значения ЭДС ротор двигателя вынужден увеличить скорость вращения. Существуют и иные способы регулирования скорости вращения в ЭП с ВД.
Для ВД малой мощности реакция якоря и коммутация существенной роли не играют, что значительно упрощает анализ. Для таких двигателей недопустимо пренебрежение активным сопротивлением обмотки статора RS, воспользуемся уравнением напряжения в комплексной форме для СД:
 , (11.1)
, (11.1)
где UС – напряжение питания; Ео – ЭДС; xd, xq – полное продольное (d) и поперечное (q) синхронное индуктивное сопротивление; Id, Iq – токи соответственно по продольной и поперечной осям; хаа – индуктивное сопротивление рассеяния. В ВД малой мощности, как правило, исполь-зуются постоянные магниты, что позволяет принять xd«xq=xa. Тогда уравнение (11.1) будет иметь вид

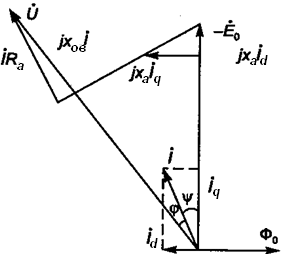
Векторная диаграмма маломощного ВД приведена на рис. 11.5:
PЭ = E0Icosψ,
что с учетом рис. 11.5позволяет записать

где x = xa+ x0a. Электромагнитный момент двигателя
MЭ = mPЭ / ω, (11.3)
где ω – скорость вращения ротора.
ПротивоЭДС Е0 выразим через поток возбуждения Ф0:
E0 = π√2 f k0 ω ФII = ce Zn ω ФII, (11.4)
где к0 – обмоточный коэффициент, учитывающий распределение и укорочение обмотки;cВ = k0ω  √2; Zn – число пар полюсов.
√2; Zn – число пар полюсов.
Тогда, согласно формулам (2.82)...(2.84),получим
 . (11.5)
. (11.5)
Значение пускового момента МЭ.П получим из выражения (11.5) при ω = 0 и х = 0:
Для максимального использования двигателя с помощью ДПР устанав-ливают θ = 0, и тогда выражение (11.5) будет иметь вид
 (11.6)
(11.6)
Из формулы (11.6) получим выражение механической характеристики:
 , (11.7)
, (11.7)
где к1 = сВФ0.
Семейство характеристик при UС = const образуется различными значениями х. Поскольку x = 2πfL = ZnωL, то характеристики, построен-ные по выражению (11.7), носят нелинейный характер, имея две общие точки: холостого хода (при МЭ=0) и пускового момента (х = 0, ω = 0).
Механические характеристики ω при различных значениях индук-тивности якоря приведены на рис.11.6,а.
При снижении скорости вращения, а также для ВД малой мощности можно положить х «R, и тогда выражение (11.7) примет вид
|
| Рис. 11.5.Векторная диаграмма маломощного ВД. Электромагнитная мощность фазы |
Полученная зависимость ω является линейной.
Для регулирования скорос-ти ВД прибегают к широтно-импульсной модуляции (ШИМ) напряжения питания на основе транзисторных инверторов. На-пряжение на каждой фазе пред-ставляет собой последователь-ность прямоугольных импуль-сов переменной скважности с постоянной частотой fКОМ. В этом случае корректно говорить о среднем напряжении UСР взамен UС. Транзисторы обес-печивают высокое значение fКОМ (до 15...20 кГц) и свести к минимуму пульсации тока.
Семейство характеристик при изменении напряжения питания приведено на рис.11.6,б.
Для получения передаточной функции (ПФ) ВД воспользуемся выражением момента (11.6) при х«R:

где k2=m RS и уравнением движения
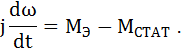
Перейдя к операторным изображениям по Лапласу, получим ПФпо управляющему воздействию:
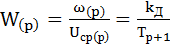 , где
, где 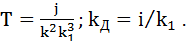 (11.8)
(11.8)
Приведенное выражение (11.8) для ПФ можно использоватьпри анализе и синтезе ЭП с ВД.
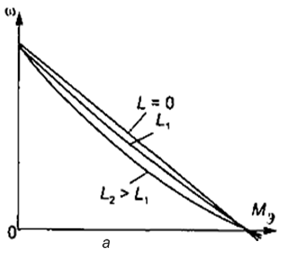
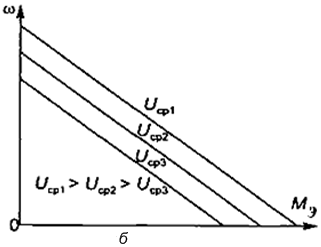
Рис.11.6.Механические характеристики ВД при различных значениях индуктивности (а) и напряжения питания (б) якоря
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 799; Нарушение авторских прав?; Мы поможем в написании вашей работы!