КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Частотное регулирование угловой скорости синхронных двигателей
|
|
|
|
Законы регулирования. Использование полупроводниковых пре-образователей частоты открывает большие возможности при создании электромеханических систем с СД. Эти системы обладают такими не-сомненными достоинствами, как стабильность угловой скорости незави-симо от момента нагрузки во всем диапазоне регулирования угловой скорости, большими значениями моментов на ползучих скоростях при регулировании напряжения и тока возбуждения. Они позволяют получить высокую точность синхронного движения управляемых машин.
Напомним, что электромагнитный момент СД с явно выраженными полюсами определяется следующей зависимостью:
 (10.1)
(10.1)
где U – напряжение якоря; Е0 – ЭДС, индуцируемая в обмотке якоря; w0 – угловая скорость магнитного поля; xd – синхронное индуктивное сопротивление по продольной оси; xq – синхронное индуктивное соп-ротивление по поперечной оси; θ – угол нагрузки.
Это выражение удобно представить, пренебрегая насыщением, в виде
 , (10.2)
, (10.2)
где Iв – ток возбуждения СД; А и В – постоянные величины.
Рассмотрим режим работы СД при f = const; U = var; I в = var. Этот режим является наиболее характерным для нерегулируемых систем с СД. Формула электромагнитного момента для этого случая имеет вид
 (10.3)
(10.3)
где
 .
.
Для характеристики электромеханических свойств удобно рассмат-ривать регулирование синхронного двигателя отдельно при IВ = var; U = const и IВ = const; U = var. Моментно-угловые характеристики при этом соответственно представлены на рис. 10.5 (при IВ = var; U = const:1 – нормальное возбуждение; 2 – повышенное возбуждение; 3 – пониженное возбуждение; М1 – момент от явнополюсности; М – суммарный момент поля возбуждения) и 10.6 (при ID = const; U = var: 1 – U = UH0H;2 – U > tIHOM; 3 – U << UH0M; At,М1 – момент от поля возбуждения; М2 – момент от явнополюсности; М – суммарный момент).
При частотном регулировании СД, когда U  f = const; IВ = var аналитическая зависимость для момента имеет вид
f = const; IВ = var аналитическая зависимость для момента имеет вид
 , (10.4)
, (10.4)
где
 .
.
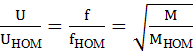
Характеристики для этого случая представлены на рис.10.7.
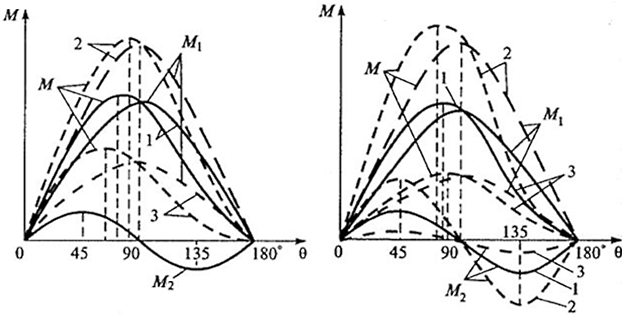
Рис. 10.5. Моментно-угловые характеристики СД
Рассмотрим режим частотного регулирования СД при U = const; IВ= = const; f = var. Формула электромагнитного момента:

где
C1 = AUIВ;C2 = BU2 .
Из последнего выражения видно, что при сниженных угловых скоростях (частотах напряжения статора) СД обладает значительным максимальным моментом.
Закон регулирования напряжения и тока возбуждения неявнополюс-ного СД или приближенный закон регулирования для крупных явнопо-люсных СД при изменении угловой скорости (частоты) и момента наг-рузки и заданном запасе статической устойчивости найдем, воспользо-вавшись первой составляющей (10.2) для электромагнитного момента.
При постоянстве угла нагрузки СД закон регулирования напряжения и тока возбуждения находим следующим образом:

откуда
 . (10.6)
. (10.6)
При U/f = UH0M fHOM = const получим зависимость регулирования тока возбуждения СД от момента на валу:
 . (10.7)
. (10.7)
Из выражения (10.7) следует, что при постоянном отношении U f возбуждение СД должно изменяться прямо пропорционально изменению момента на валу.
Для IВ = IВ НОМ = const из (10.6) следует, что U f = UHOM fHOM = const, и регулирование производится при постоянном моменте.U f = const; IВ = var: 1 – нормальное возбуждение; 2 – повышенное возбуждение; 3 –по-ниженное возбуждение; М – момент от поля возбуждения; М2 – момент от явнополюсности; М – суммарный момент.
Для СД с явно выраженными полюсами при существенном влиянии реактивной составляющей момента закон регулирования напряжения определяется таким же образом, как и для неявнополюсной машины. Из уравнения (10.1) при условии постоянства угла θ и тока возбуждения (IВ = const), приняв в ограниченном диапазоне регулирования угловой скорости E = U, получим
 ,
,
т.е. закон регулирования имеет тот же вид, что и для АД при частотном управлении. Следовательно, и частотные законы регулирования для различного вида нагрузок будут одинаковыми для обоих типов машин:U/f = const приМ = МНОМ = const, U/f = const приР = РНОМ = const; U/f2 = const при вентиляторной нагрузке.
Частотное регулирование, являясь практически единственным спо-собом регулирования угловой скорости СД, характеризуется в основном такими же показателями, что и :частотное регулирование АД с КЗ ротором.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1528; Нарушение авторских прав?; Мы поможем в написании вашей работы!