КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структуры и режимы работы систем управления положением
|
|
|
|
Структурные схемы систем управления положением приведены на рис. 16.2. На рис. 16.2,апоказана разомкнутая по положению система. Она применяется, если требуемая точность невысокая, как в подъемно-транспортных устройствах. При подходе к заданному положению зада-ющий сигнал становится нулевым или формирует переход на понижен-ную скорость (для улучшения точности), а затем отключается. На рис. 16.2 приняты следующие обозначения: УУ – устройство управления, ОУ – объект управления, и – сигнал управления, х – выходная величина (положение), х – скорость, W(p) – передаточная функция контура скорости, К(р) – передаточная функция регулятора, kо.п – коэффициент ОС по положению, 8 – ошибка регулирования. На рис. 16.2,б показана система с управлением по возмущению. Основным возмущающим воз-действием систем контурного управления и следящих систем является скачок скорости задающего сигнала, т.е. величина du3/dy=и3. В самом деле, скачок величины и3 требует изменения скорости, т.е. разгона или торможения ЭП. Поскольку ускорение привода ограничено, для измене-ния скорости требуется некоторое время, в течение которого и накап-ливается рассогласование. Для компенсации влияния возмущения в структуру добавляется параллельный канал с коэффициентом усиления А. Он способствует скорейшему изменению скорости приводав том же направлении, что и задание.
Преимуществом управления по возмущению является возможность получения заданной точности без использования датчика положения, а недостаток – неучет других возмущений, которые могут увеличить ошибку по положению.
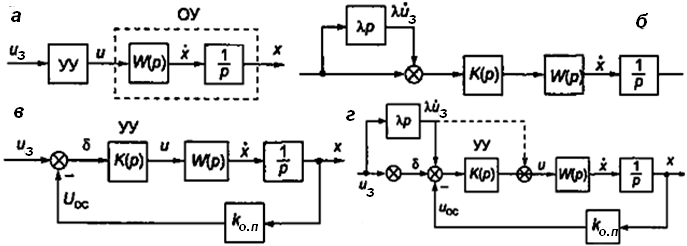
Рис. 16.2. Структурные схемы систем управления положением
На рис.16.2,впоказана структура с управлением по отклонению, имеющая обратную связь UOC по положению. Эта структура является основной, наиболее часто применяемой. Принцип действия данной системы заключается в следующем. Если на вход системы подается задающее воздействие, то сигнал управления и, а значит, и скорость х возрастают, увеличивается выходная величина х, уменьшается ошибка δ. Она пропорциональна рассогласованию по положению Ах = х3 - х, где х3 = иЗkо.п – заданное положение.
В режиме позиционирования величина иЗ определяет требуемое конечное состояние рабочего органа. При наличии статического момента Мс на валу двигателя установившийся режим достигается при и3 = const, и = const, х = 0. Сигнал управления пропорционален Мс, поскольку он необходим для создания электромагнитного момента двигателя, уравновешивающего Мс. Если применяется пропорциональ-ный регулятор положениято ошибка позиционирования будет прямо пропорциональна статическому моменту. Для устранения ошибки в таких системах применяются астатические (обычно пропорционально-интегрирующие) регуляторы.
В режиме контурного управления основным задающим воздейст-вием, для которого выполняется расчет системы, является скачок скорости. Основным установившимся режимом служит режим постоян-ства скорости. На рис. 16.3,а приведены ступенчатый график заданной скорости х3 и кривая фактической скорости х с учетом ограничения на ускорение. Здесь показан предельный случай, когда в течение всего про-цесса ускорение максимально. На интервале разгона t0 график пере-мещения x(t) имеет форму параболы (интеграл линейной функции x(t)). В результате отставания выходной скорости от заданной на интервале t0 накапливается рассогласование по положению, определяемое площа-дью треугольника:

Чем больше скачок скорости задающего воздействия, тем больше рассогласование. Из последнего выражения также следует, что для повышения точности следящей системы необходимо, чтобы время разгона было как можно меньше.
Добротностью по скорости следящей системы называется величина отношения скачка скорости к возникающему при этом рассог-ласованию по положению:
Dω = x3/Δx.
Величина Dω определяется для установившегося режима, когда х3 = х. Если обозначить скорость поступательного движения v, враща-тельного ω, а рассогласование  , то добротность может быть выражена как через угловую скорость двигателя, так и через линейную скорость рабочего органа:
, то добротность может быть выражена как через угловую скорость двигателя, так и через линейную скорость рабочего органа:
Из структурной схемы, приведенной на рис. 16.2,в, следует, что доб-ротность по скорости численно равна коэффициенту усиления разом-кнутого контура. В самом деле, в установившемся режиме получим

Поскольку в системах управления положением наиболее желательным является монотонный переходный процесс, без перерегу-лирования, то, как видно из рис. 16.3,а, рассогласование , а значит, и добротность однозначно определяются быстродействием ЭП.
Для повышения точности следящих систем с учетом ограничения на ускорение во многих случаях применяется астатический регулятор К(р), обычно пропорционально-интегрирующий. Тогда график разгона в пре-дельном случае максимального ускорения примет вид, показанный на рис. 16.3,б, благодаря чему ошибка, накопленная за время tn умень-шается до нуля к моменту окончания переходного процесса в соот-ветствии с предельной диаграммой.
Кривая изменения скорости x(t) в этом случае имеет перерегули-рование
σ=(xmax-x3)/x1.
В частности, установившийся режим постоянства скорости в системе, показанной на рис. 16.2,в, наступает при х = const, u = const, а значит, в случае интегрирующего регулятора должно быть δ = 0.
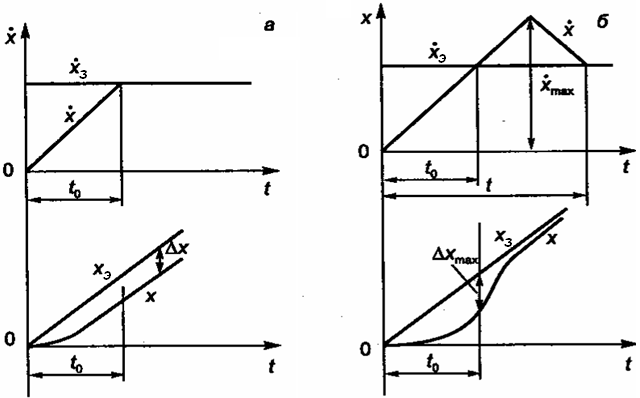
Рис.16.3. Предельные диаграммы при разгоне
Коэффициент усиления X канала компенсации возмущения рассчи-тывают по условию полной компенсации или исходя из требуемой доб-ротности. При полной компенсации процессы имеют такой же вид, как на рис. 16.3, б. В случае недокомпенсации имеется установившееся рассогласование Δx. Операторное изображение рассогласования имеет вид
Δx=u3/ 
в случае воздействия в виде скачка скорости, поэтому

 .
.
Для определения установившегося значения рассогласования принимается δ = 0, тогда х = х3 и
Компенсирующее воздействие может быть приложено на входе контура скорости. Тогда его можно рассматривать как составляющую сигнала управления, задающую скорость.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 913; Нарушение авторских прав?; Мы поможем в написании вашей работы!