- Р Р‡.МессенРТвЂВВВВВВВВжер
- ВКонтакте
- РћРТвЂВВВВВВВВнокласснРСвЂВВВВВВВВРєРСвЂВВВВВВВВ
- РњРѕР№ Р В Р’В Р РЋРЎв„ўР В Р’В Р РЋРІР‚ВВВВВВВВРЎР‚
- LiveJournal
КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электроприводы систем управления положением
|
|
|
|
| Т |
ипы систем управления положением. В технике находят применение системы и устройства, в которых необходимо управлять пространственным положением рабочего органа. Прос-тейшие из них требуют управления положением при линейном переме-щении в одном направлении или при повороте вокруг одной оси. Сюда относятся механизмы позиционирования инструмента относительно обрабатываемой поверхности в металлорежущих станках (рис. 16.1,а).
Шпиндель с инструментом должен переместиться в заданное поло-жение х3 из положения х, чтобы обрабатывать отверстие. Рассог-ласование по положению равно Ах. На рис. 16.1,б показан механизм нажимного устройства прокатного стана, устанавливающий верхний валок в заданное положение у3, соответствующее требуемому обжатию. Механизм рулевого управления автомобиля выполняет поворот перед-них колес вокруг вертикальной оси на заданный угол. Здесь так же, как и в предыдущем случае, выходной регулируемой величиной является положение рабочего органа (колеса), но угловое.
Подъемно-транспортные машины (подъемные краны, экскаваторы, лифты, конвейеры, электрокары) выполняют задачу перемещения груза в заданную область пространства. Здесь необходимо управление поло-жением, не требующее высокой точности. Перемещение является трехмерным. На рис 16.1, в показано перемещение груза из положения А в положение A0. Положение А характеризуется вектором координат 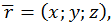 z) а заданная точка A0 – вектором
z) а заданная точка A0 – вектором  ). Рассогласо-вание по положению
). Рассогласо-вание по положению
Δr=(x3-x,y3-y,z3-z).
Движение вдоль оси х осуществляется мостом крана, вдоль оси у – тележкой, вдоль оси z – механизмом подъема.
Характерным примером системы управления положением являются манипуляторы и промышленные роботы, задача управления которыми заключается в обеспечении заданного положения схвата с манипули-руемым предметом и его ориентации (рис. 16.1,г).
В зависимости от назначения системы управления положением рабочего органа подразделяются на позиционные, контурные и следящие.
Позиционными называются системы, предназначенные для отработки заданных перемещений (позиционирования рабочего органа в заданную точку) с заданной точностью. Примерами позиционных систем являются системы, показанные на рис.16.1,а...в.
Рис. 16.1. Примеры систем управления положением
Манипуляционный робот (рис.16.1,г) может выполнять как позицио-нирование, так и перемещение схвата по заданной траектории, в зависи-мости от выполняемых функций. Так, для обслуживания станков, прес-сов и литейных машин манипуляционный робот выполняет перемеще-ние в зону обработки, снятие готового изделия, транспортировку в отведенное место, т.е. задачу позиционирования.
Контурными называют системы, предназначенные для передви-жения рабочего органа по заданной пространственной траектории с заданной точностью. Для окраски, сварки, резки листового материала и обработки сложных поверхностей в схвате манипулятора закрепляется инструмент, который должен двигаться по заданной траектории. В этом случае функционирует контурная система управления положением.
Каждое звено манипуляционного робота (рис. 16.1,г) при движении из точки А в заданную точку А0 поворачивается на определенный угол. Этот поворот осуществляется ЭП, имеющим редуктор. Двигатель и ре-дуктор встроены в кинематическую пару.
Чтобы обеспечить контурное управление, каждый привод должен выполнять поворот так, чтобы угол поворота был заданной функцией времени. Результирующее движение схвата будет происходить по задан-ной пространственной кривой. Отсюда следует, что в зависимости от требуемых движений задающие воздействия на каждый ЭП програм-мируются в виде различных функций времени.
Следящей системой называется система управления положением, выходная величина которой воспроизводит с заданной точностью зада-ющее воздействие, являющееся функцией времени. Системы контурного управления – это следящие системы. Другая разновидность следящих систем имеет задающий сигнал в виде случайной или непредвиденной функции времени. Примерами таких систем являются ЭП радиоло-каторов, следящих за движущейся целью.
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1038; Нарушение авторских прав?; Мы поможем в написании вашей работы!