КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Ограничения переменных в системах управления положением
|
|
|
|
Переменные, характеризующие процессы в ЭП, не должны превы-шать допустимых для них значений. Положение, скорость, ускорение и момент должны быть ограничены по модулю. Наибольшее перемещение обычно зависит от размеров рабочей зоны, наибольшая скорость ограничена возможностями двигателя, а ускорение – требованием плав-ности движения. Момент привода может быть ограничен по условиям прочности механической части, а также возможностями ЭП.
При наличии ограничений обычно различают большие перемещения, когда все переменные достигают предельных для них значе-ний в процессе движения (рис. 16.4,а,б), средние перемещения, когда лишь некоторые переменные достигают предельных значений (рис. 16.4,в), и малые перемещения, когда ограничения не достигаются (рис. 16.4,г).
Для ограничения переменных в системах управления применяется несколько способов.
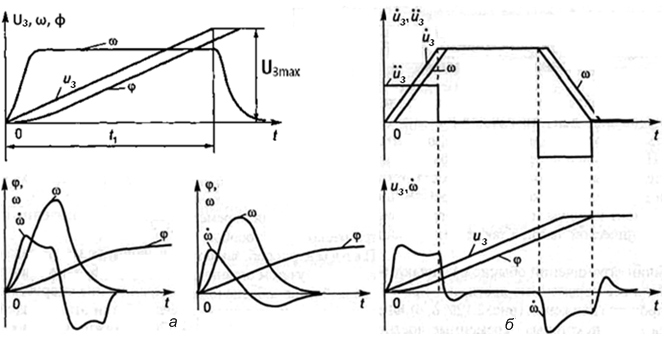
Рис. 16.4. Процессы с учетом ограничений
Первый способ заключается в формировании задающего воздейс-твия с учетом ограничений. На рис.16.4,а показано задающее воздейс-твие u3, обеспечивающее ограничение скорости значением ω, а также процесс отработки этого воздействия системой (кривые  , φ). На рис. 16.4,б показано задающее воздействие
, φ). На рис. 16.4,б показано задающее воздействие  , обеспечивающее ограничение ускорения по модулю при разгоне и торможении, а также ограничение скорости. Кривая
, обеспечивающее ограничение ускорения по модулю при разгоне и торможении, а также ограничение скорости. Кривая  , являющаяся заданием для скорости, показана на рис. 16.4,б (верхний график, имеющий вид трапеции). Процесс отработки задающего воздействия представлен кривыми φ, .
, являющаяся заданием для скорости, показана на рис. 16.4,б (верхний график, имеющий вид трапеции). Процесс отработки задающего воздействия представлен кривыми φ, .
Второй способ нашел применение в многоконтурных системах. Он предусматривает ограничение переменных на задающих входах. Струк-тура такой системы показана на рис. 16.5.
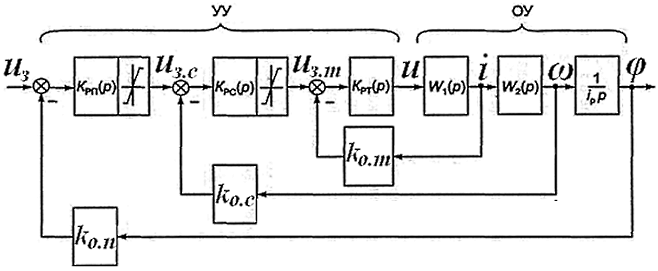
Рис. 16.5. Структура многоконтурной системы
Здесь объект управления представлен передаточными функциями Wx(p), W2(p) и интегрирующим звеном, учитывающим

преобразование скорости ω двигателя в уголповорота рабочего органа φ. Устройство управления содержит регуляторы тока,скорости и положе-ния: КРТ(р), КРС(р), КРП(р), синтезируемые методом подчиненного регу-лирования (последовательной оптимизации контуров). Регуляторы поло-жения и скорости предусматривают ограничения выходных величин по модулю. Выходная величина регулятора положения представляет собой сигнал задания скорости из.с, а выходная величина регулятора скорости есть сигнал задания тока iз.т. Требуемые уровни ограничений скорости и тока достигаются настройкой коэффициентов обратных связей по скорости и току в соответствии с выражениями:

где  ,
,  – максимальные значения задающих сигналов;
– максимальные значения задающих сигналов;  ,
,  – максимальные значения переменных.
– максимальные значения переменных.
Третий способ заключается в применении нелинейной ОС по ограничиваемой переменной. На рис. 16.6 показана структура системы с ограничением тока с помощью отсечки по току. Для ограничения тока применяется нелинейное звено (НЗ) с зоной нечувствительности в ОС по току. Ширина зоны нечувствительности равна Imах. Если ток находится в допустимых пределах, на выходе НЗ сигнал равен нулю. Если I > Imах, появляется выходной сигнал u0, который способствует резкому умень-шению сигнала управления, что и ограничивает ток. Наклон харак-теристики НЗ должен удовлетворять условиям устойчивости контура тока и системы в целом.
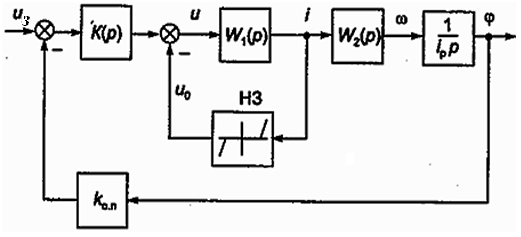
Рис.16.6. Структура системы с ограничением тока
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 821; Нарушение авторских прав?; Мы поможем в написании вашей работы!