КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Линейный двигатель постоянного тока
|
|
|
|
Наряду с асинхронными и синхронными ЛД применяются линейные двигатели постоянного тока (ЛДПТ). Они чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных пусковых усилий. ЛДПТ состоит из якоря с расположенной на нём обмоткой, служащей одновременно коллектором (направляющий элемент), и разомкнутого магнитопровода с обмотками возбуждения (подвижная часть), расположенными так, что векторы сил, возникающих под полюсами магнито-провода, имеют одинаковое направление. ЛДПТ, как и двигатели вращательного движения, позволяют при необходимости просто регулировать скорость движения рабочих органов.
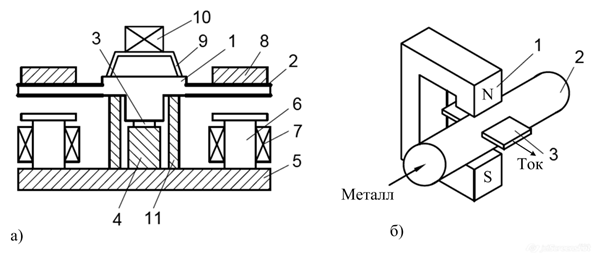
Рис. 15.14: а – линейный двигатель для транспортировки изделий, б – магнитогидродинамический насос постоянного тока
ЛДПТ для перемещения промышленных изделий, рис. 15.14,а – представляет собой ДПТ с полым цилиндрическим якорем, разрезанный по образующей и развёрнутый в плоскость. Подвижная часть двигателя – якорь – состоит из немагнитного остова 1 и укреплённой на нём обмотки 2 якоря, которая может быть выполнена из изолированного обмоточного провода или изготовлена из медной фольги путём её травления. Ширина витков обмотки в направлении движения, как и в обычных ДПТ, близка к полюсному делению (т. е. расстоянию по окружности между полюсами магнитной системы двигателя). Токо-провод к обмотке осуществляется с помощью коллектора 3 и щёток 4. На станине двигателя 5 крепится комплект полюсов 6 с обмотками возбуждения 7, размещённых в ряд по направлению движения якоря. Другими частями магнитопровода двигателя являются стальные сер-дечники 8 и сама станина, выполненная также из ферромагнитного мате-риала. Якорь двигателя вместе со столиком 9 для крепления перемеща-емого изделия 10 движется по неподвижным опорам 11 так, что его плоскости с обмотками всё время находятся в зазоре между сердечни-ками 8 и полюсами 6. На принципе работы линейного двигателя основа-но действие специальных насосов для перекачки электро-проводящих жидкостей (рис.15.14,б) и в том числе жидких металлов. Такие насосы (магнитогидродинамические) применяются в металлургии для транспор-тировки, дозировки и перемешивания жидкого металла, а также на атомных электростанциях для перекачки жидкометаллического теплоно-сителя.
Расчет тягового усилия Fтяги, действующего на один из элементов индукторного ЛДПТ, содержащего две обмотки и перемещающегося вдоль координаты x, возможен на основе выражения, описывающего процесс электромеханического преобразования энергии в индукторных машинах.

где IB – ток обмотки возбуждения, IA – ток обмотки якоря, LA – индуктивность обмотки якоря, LBA – взаимоиндуктивность обмоток возбуждения и якоря. Конструктивные исполнения индукторных ЛДПТ представлена на рис. 15.15.
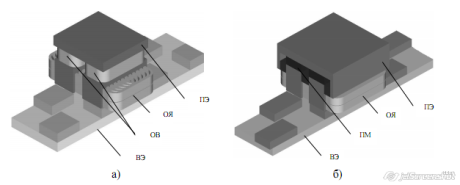
Рис. 15.15 Конструктивные исполнения индукторных ЛДПТ
Контрольные вопросы
1. Какой ШД лучше: с меньшим или большим числом фаз?
2. Чем ограничивается число фаз ШД?
3. Поясните преимущества и недостатки несимметричной коммутации. Постройте векторные диаграммы и определите степень неравномерности поля для двигателей с числом фаз т = 4, т = 5 при коммутации (1) – (12) – (2) –...
4. Какими конструктивными решениями можно уменьшить величину шага ШД с постоянными магнитами?
5. Какой ШД предпочтительнее, с точки зрения точности отработки задаваемого перемещения: с постоянными магнитами или индукторный?
6. Чем ограничивается верхний предел частоты управляющих импульсов ШД?
7. Перечислите методы форсировки тока в фазах двигателя. Опишите их достоинства и недостатки.
8. В каких установках предпочтительно использование модулей ШД?
9. Отличается ли принцип действия линейного ШД от ШД враща-тельного типа?
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 2712; Нарушение авторских прав?; Мы поможем в написании вашей работы!