КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
С элементами оптимизации
|
|
|
|
Определение опорных реакций составной балки
Задача С5
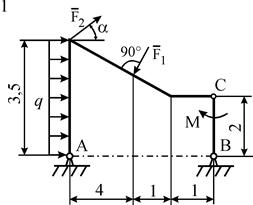
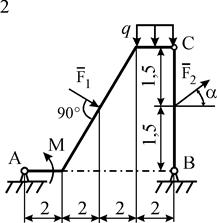
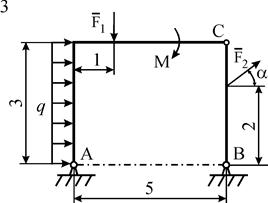
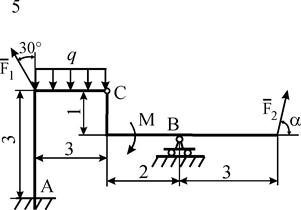
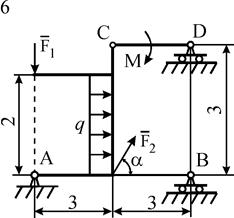
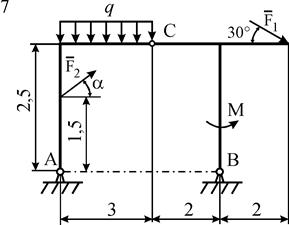
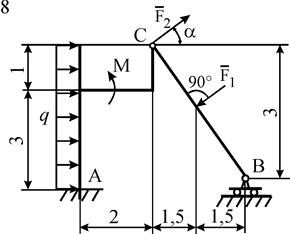
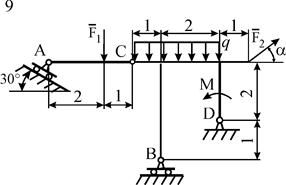
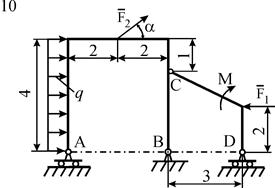
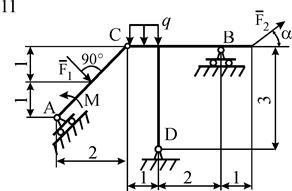
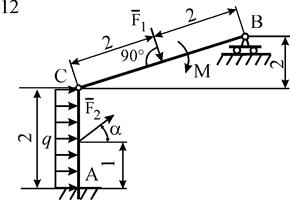
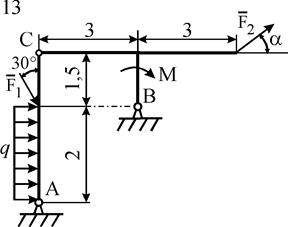
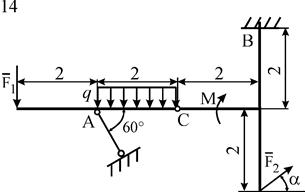
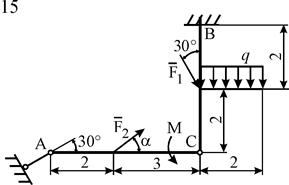
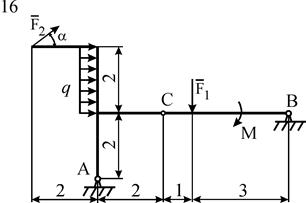
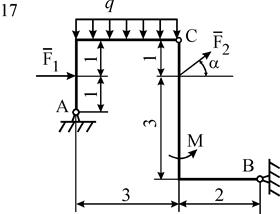
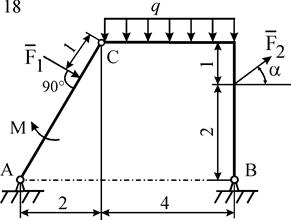
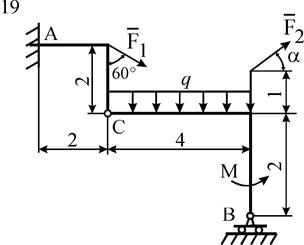
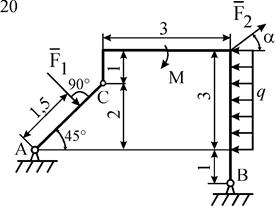
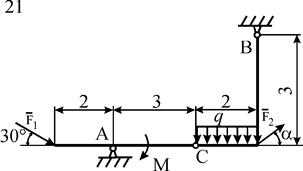
Схемы конструкций изображены на рис. С5.1–С5.4. Исходные данные приведены в табл. С5. Во всех вариантах сила  наклонена к оси x под углом a, который изменяется от 0 до 2p. Требуется определить реакции связей в функции угла a. Кроме того, необходимо найти значения угла a, при которых вес исследуемой опоры и потенциальная энергия деформации всех опор оказываются минимальными.
наклонена к оси x под углом a, который изменяется от 0 до 2p. Требуется определить реакции связей в функции угла a. Кроме того, необходимо найти значения угла a, при которых вес исследуемой опоры и потенциальная энергия деформации всех опор оказываются минимальными.
Методика решения задачи с элементами оптимизации
Решить поставленную задачу – значит найти лучший вариант проектируемого объекта, например, конструкции машины или сооружения, технологического процесса и др. В данном случае решение задачи оптимизации сводится к определению значений угла a, при которых рассматриваемая конструкция оказывается лучшей по одному из двух критериев: или одна из исследуемых опор должна иметь минимальный вес, или все опоры должны деформироваться с минимальной потенциальной энергией. Последнее эквивалентно, например, минимальному нагреву опоры, обусловленному ее деформацией.
Критерий минимального веса опоры
Для упрощения задачи представим все опоры в виде стержней заданной длины, расположенных вдоль составляющих сил реакций. Таким образом каждый стержень будет нагружен некоторой продольной силой  , модуль которой равен модулю соответствующей силы реакции рассматриваемой опоры. Если реакцией опоры является пара сил, то паре соответствуют два стержня – по одному для каждой силы.
, модуль которой равен модулю соответствующей силы реакции рассматриваемой опоры. Если реакцией опоры является пара сил, то паре соответствуют два стержня – по одному для каждой силы.
Модуль силы можно представить в виде
 , (25)
, (25)
где S – площадь поперечного сечения стержня, s – сила, приходящаяся на единицу этой площади.
Умножим и разделим правую часть равенства (25) на длину l стержня и удельный вес g материала, из которого он изготовлен. Получим
 , (26)
, (26)
где G – вес стержня, l* = l ×g/s.
|
|
|

|
|
|
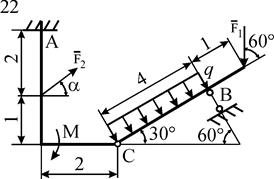
Рис. С5.1
|
|
|
|
|
|
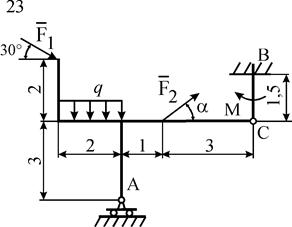
Рис. С5.2
|
|
|
|
|
|
Рис. С5.3
|
|
|
|
|

|
Рис. С5.4
Таблица С5
| Номер варианта (рис. С5.1–С5.4) | F1 | F2 | М, | q, | Исследуемая реакция |
| кН | кН×м | кН/м | |||
| 5,0 | 7,0 | 24,0 | 0,8 | RA | |
| 6,0 | 10,0 | 22,0 | 1,0 | RB | |
| 7,0 | 9,0 | 20,0 | 1,2 | RA | |
| 8,0 | 8,0 | 18,0 | 1,4 | RA | |
| 9,0 | 7,0 | 16,0 | 1,6 | RB | |
| 11,0 | 7,0 | 20,0 | 2,0 | RD | |
| 13,0 | 10,0 | 10,0 | 2,4 | RA | |
| 14,0 | 12,0 | 14,0 | 2,6 | RB | |
| 15,0 | 5,0 | 14,0 | 2,8 | RD | |
| 12,0 | 4,0 | 16,0 | 3,0 | RA | |
| 9,0 | 6,0 | 18,0 | 3,2 | RA | |
| 6,0 | 8,0 | 20,0 | 3,4 | RA | |
| 9,0 | 12,0 | 26,0 | 4,0 | RB | |
| 11,0 | 10,0 | 18,0 | 3,5 | RB | |
| 13,0 | 9,0 | 30,0 | 3,0 | RA | |
| 10,0 | 7,0 | 20,0 | 2,0 | RB | |
| 5,0 | 6,0 | 15,0 | 1,5 | RA | |
| 8,0 | 5,0 | 10,0 | 1,4 | RA | |
| 11,0 | 4,0 | 5,0 | 1,3 | RA | |
| 12,0 | 8,0 | 9,0 | 1,1 | RB | |
| 8,0 | 9,0 | 13,0 | 1,2 | RA | |
| 6,0 | 10,0 | 15,0 | 1,4 | RA | |
| 10,0 | 12,0 | 17,0 | 1,6 | RA | |
| 12,0 | 6,0 | 15,0 | 2,2 | RA |
Как видно, при заданном коэффициенте l* оптимизацию по весу стержня можно заменить оптимизацией по силе . В дальнейшем входящие в коэффициент l* величины l, g, s считаются известными. Для расчета их значения не понадобятся.
В тех вариантах задачи, где опора A представляет собой жесткую заделку, роль силы играет равнодействующая, которая равна главному вектору  плоской системы сил реакций заделки, линия действия которой находится на некотором расстоянии h от точки A (h = MA/RA). В тех вариантах, где в точке A расположена шарнирно-неподвижная опора,
плоской системы сил реакций заделки, линия действия которой находится на некотором расстоянии h от точки A (h = MA/RA). В тех вариантах, где в точке A расположена шарнирно-неподвижная опора,
 .
.
В данной задаче в результате решения соответствующей системы уравнений равновесия находят RA как функцию одного аргумента a. Оптимальное значение реакции найдется из исследования функции RA на глобальный экстремум, в данном случае глобальный минимум (глобальным минимумом функции называется наименьшее ее значение в изучаемом интервале изменения аргумента).
Численные значения реакций всех опор зависят от sin a и cos a, которые имеют период 2p. Это позволяет ограничиться поиском глобального минимума RA в интервале изменения аргумента a:
Значения RA вычисляются с интервалом Da = p/12 в соответствии с формулой  , где k = 1, 2,..., 24 и
, где k = 1, 2,..., 24 и  . По вычисленным значениям реакции RA строится график зависимости RA = RA (a), из которого находят значение a, соответствующее глобальному минимуму RA.
. По вычисленным значениям реакции RA строится график зависимости RA = RA (a), из которого находят значение a, соответствующее глобальному минимуму RA.
Критерий минимальной потенциальной энергии деформации
По-прежнему опоры представляем стержнями, работающими по направлениям составляющих реакций.
Из курса физики известно, что потенциальная энергия П i деформации i -го стержня, нагруженного продольной силой N i, равна
 , (27)
, (27)
где  – удлинение (деформация) i -го стержня, вызванное силой N i.
– удлинение (деформация) i -го стержня, вызванное силой N i.
Деформация определяется согласно закону Гука:
 . (28)
. (28)
Здесь  – длина i -го стержня;
– длина i -го стержня;  – площадь его поперечного сечения;
– площадь его поперечного сечения;  – модуль упругости материала, из которого этот стержень изготовлен.
– модуль упругости материала, из которого этот стержень изготовлен.
Подставив (28) в (27), найдем потенциальную энергию стержня в виде
 , (29)
, (29)
где коэффициент  .
.
В дальнейшем величина  считается известной и постоянной для всех стержней (
считается известной и постоянной для всех стержней ( ). Суммарная потенциальная энергия стержней (опор) найдется сложением (29):
). Суммарная потенциальная энергия стержней (опор) найдется сложением (29):
 . (30)
. (30)
Как видно, при известном коэффициенте  оптимизацию конструкции по потенциальной энергии деформации опор можно заменить оптимизацией по параметру, равному сумме квадратов модулей составляющих сил реакций всех опор. Соответствующая целевая функция будет
оптимизацию конструкции по потенциальной энергии деформации опор можно заменить оптимизацией по параметру, равному сумме квадратов модулей составляющих сил реакций всех опор. Соответствующая целевая функция будет
 , (31)
, (31)
где X i – модуль i -й составляющей реакции соответствующей опоры.
Следует отметить, что в числе модулей реакций могут быть как силы, так и моменты пар сил. Для приведения тех и других к одной размерности значения X i, соответствующие моментам, необходимо разделить на характерный габаритный размер h конструкции. Во всех вариантах задания величину h принять равной 1м.
С помощью найденных выше значений X i определяется целевая функция с шагом Da = p/12. По вычисленной целевой функции строится график f (a) в интервале  . Глобальный минимум этого графика соответствует оптимальному значению угла a.
. Глобальный минимум этого графика соответствует оптимальному значению угла a.
Пример выполнения задания
Постановка задачи и получение расчетных формул
На рис.С5а представлена схема составной конструкции, два элемента которой (АС и СВ) соединены между собой цилиндрическим шарниромC. На конструкцию в целом наложены внешние связи в виде шарнирно-неподвижных опор A и B и внутренняя связь в шарнире С. Размеры элементов указаны в метрах.
Дано: F1 = 10 кH, F2 = 7,0 кН, М = 11 кН×м, q = 1 кН/м, b = 600.
Определить, при каких значениях угла a опора А будет иметь наименьший вес и потенциальная энергия деформации всех опор минимальной.
Решение. Заменим равномерно распределенную нагрузку интенсивностью q равнодействующей  , модуль которой Q = q×3 = 3 кН, а точка приложения находится на середине вертикального участка элемента СВ.
, модуль которой Q = q×3 = 3 кН, а точка приложения находится на середине вертикального участка элемента СВ.
Расчленим заданную конструкцию на два элемента АС и СВ, представленные на рис. С5б и рис. С5в соответственно.
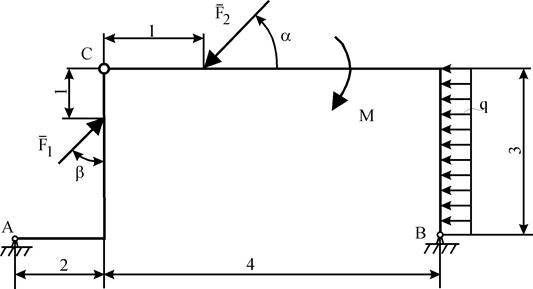
Рис. С5а
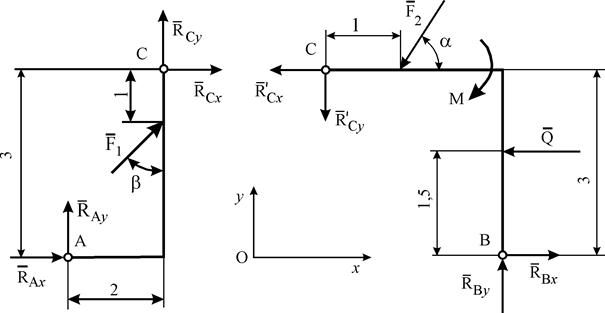
Рис. С5б Рис. С5в
К каждому элементу прикладываем заданные активные силы и реакции внешних и внутренней связей. Примем для обоих элементов единую систему координат О xy. В точке А элемента АС прикладываем составляющие (компоненты)  и
и  реакции
реакции  внешней связи, а в точке С – составляющие
внешней связи, а в точке С – составляющие  и
и  реакции
реакции  внутренней связи. В точке В элемента ВС прикладываем составляющие
внутренней связи. В точке В элемента ВС прикладываем составляющие  и
и  реакции
реакции  внешней связи, а в точке С – составляющие
внешней связи, а в точке С – составляющие  и
и  реакции
реакции  внутренней связи ( = - , = -
внутренней связи ( = - , = -  ).
).
Составим уравнения, выражающие равновесие элемента АС:
 (32)
(32)
 (33)
(33)
 (34)
(34)
Составим уравнения равновесия элемента ВС:
 (35)
(35)
 (36)
(36)
 (37)
(37)
С учетом, что  , уравнения (32)–(37) перепишем в виде системы шести уравнений, перенеся в их правые части известные члены, считая, что значение угла a также задано:
, уравнения (32)–(37) перепишем в виде системы шести уравнений, перенеся в их правые части известные члены, считая, что значение угла a также задано:
 (38)
(38)
Система уравнений (38) позволяет определить реакции связей как функции угла a ( ).
).
С целью упрощения уравнений (38) подставим числовые значения заданных постоянных величин:
 (39)
(39)
Матричная форма уравнений равновесия
Правые части уравнений (39) имеют вид
 (40)
(40)
Представим систему уравнений (39) в матричной форме:
 (41)
(41)
где X – матрица-столбец неизвестных,
 (42)
(42)
A – матрица коэффициентов при неизвестных,
 (43)
(43)
матрица-столбец правых частей системы уравнений (39)
 (44)
(44)
Для любого варианта задания каждый элемент этого столбца может иметь вид  , где коэффициенты a, b и с зависят от заданных сил и их плеч.
, где коэффициенты a, b и с зависят от заданных сил и их плеч.
В матрицах (43) и (44) целые числа являются точными, дробное число должно быть записано с относительной погрешностью, соответствующей пяти верным значащим цифрам. Такая же запись промежуточных результатов должна быть сохранена во всех вариантах задания. Она вытекает из принятой в инженерной практике точности расчетов в 5 %, что соответствует записи окончательных результатов с тремя верными значащими цифрами.
Решением матричного уравнения (41) будет

где А-1 – матрица, обратная матрице А.
Алгоритм вычислений
Для решения матричного уравнения (41) в Mathcad имеется функция lsolve (A, B), которая возвращает вектор Х для системы уравнений А×Х = В при заданной матрице коэффициентов А и векторе свободных членов В. В нашей задаче матрица В является переменной, зависящей от угла a. Выбираем шаг изменения угла Da = p/12.
Модули реакций в точках определяются через составляющие
Из графика R i (a) находим значение угла, при котором данная реакция имеет минимум.
Результаты вычислений
Значения модулей составляющих реакций всех связей полной искомой реакции должны быть сведены в табл. С5.1.
Таблица С5.1
| Обозначения, принятые в расчете | RA x | RA y | RC x | RC y | RB x | RB y | RA |

|
| Их иденти-фикаторы | X(1) | X(2) | X(3) | X(4) | X(5) | X(6) | F | П |
| a = 0 | ||||||||
| a = p/12 | ||||||||
| a = p/6 | ||||||||
| . | . | . | . | . | . | . | ||
| 2p |
По данным табл. С5.1 вначале строим график RA в функции от угла a (рис. C5г). Для этого наносим на координатную плоскость RA – a точки, соответствующие вычисленным значениям реакции. Полученные точки соединяем плавной кривой. На этой кривой отмечаем точку, соответствующую значению глобального минимума реакции RAmin и по ней находим значение amin, т. е. угла a, соответствующего значению RAmin.
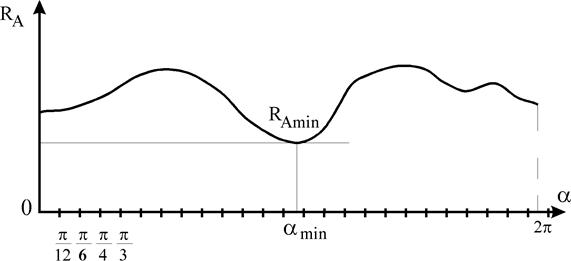
Рис. С5г
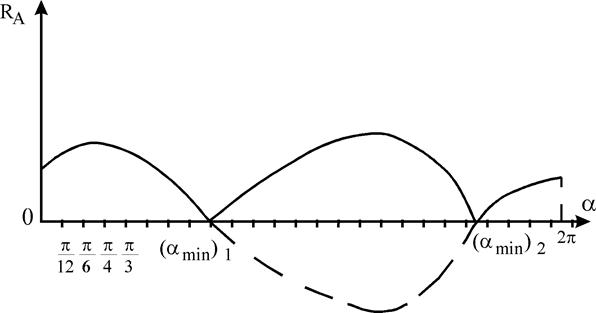
Рис. С5д
Примечание. В тех вариантах задания, где в точке A расположена шарнирно-подвижная опора или невесомый стержень, кривая зависимости RA = RA(a) может пересекать ось a и часть ее располагаться ниже этой оси (рис. С5д). Это означает, что для этой части кривой значения модулей оказались отрицательными. Эта часть графика показана пунктиром.
Поскольку модуль не может быть отрицательным, нижнюю часть графика следует зеркально перенести вверх относительно оси a. Точки пересечения кривой (сплошной и пунктирной) с осью a дают значения углов (amin)1, (amin)2, соответствующих значению реакции RA, равное нулю (глобальный минимум).
Для оценки оптимальности конструкции по второму критерию строим график изменения сумм квадратов модулей составляющих реакции в зависимости от угла a (рис. С5е).
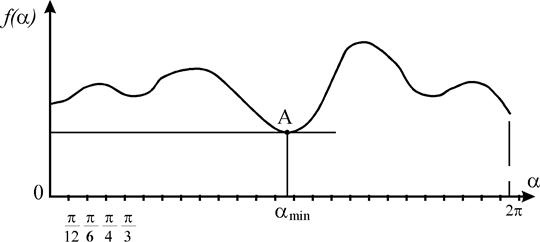
Рис. С5е
На графике отмечаем точку A, соответствующую глобальному минимуму целевой функции f (a) и определяем угол amin.
Содержание отчета
Отчет по работе должен содержать:
1) схему конструкции, исходные данные и постановку задачи;
2) изложение расчета с расчетными схемами и краткими пояснениями (уравнениями равновесия, решение уравнений в общем виде, запись целевых функций, методику нахождения оптимального угла a);
3) схему алгоритма, программу;
4) распечатку числовых результатов, графики, анализ результатов.
Вычисляем потенциальную энергию деформации:
П (a) = (Х(a)1)2 + (Х(a)2)2 + (Х(a)3)2 + (Х(a)4)2 + (Х(a)5)2 + (Х(a)6)2.
Таблица C5.2
| j | X(1) | X(2) | X(3) | X(4) | X(5) | X(6) | F | П |
| -5.4222 | -3.8033 | -3.2378 | -1.1967 | 6.7622 | -1.1960 | 6.6231 | 102.941 | |
| 0.2618 | -4.8978 | -3.0167 | -3.7622 | -1.9833 | 5.9993 | -0.1715 | 5.7523 | 87.198 |
| 0.5236 | -4.5682 | -2.5222 | -4.0918 | -2.4778 | 4.9703 | 1.0222 | 5.2182 | 75.862 |
| 0.7854 | -4.4557 | -2.3536 | -4.2043 | -2.6464 | 3.7455 | 2.3033 | 5.0391 | 69.406 |
| 1.0472 | -4.5682 | -2.5222 | -4.0918 | -2.4778 | 2.4082 | 3.5844 | 5.2182 | 68.760 |
| 1.3090 | -4.8978 | -3.0167 | -3.7622 | -1.9833 | 1.0496 | 4.7782 | 5.7523 | 75.109 |
| 1.5708 | -5.4222 | -3.8033 | -3.2378 | -1.1967 | -0.2378 | 5.8033 | 6.6231 | 89.516 |
| 1.8326 | -6.1056 | -4.8285 | -2.5544 | -0.1715 | -1.3661 | 6.5899 | 7.7841 | 112.441 |
| 2.0944 | -6.9015 | -6.0222 | -1.7585 | 1.0222 | -2.2585 | 7.0844 | 9.1596 | 143.325 |
| 2.3562 | -7.7556 | -7.3033 | -0.9044 | 2.3033 | -2.8542 | 7.2531 | 10.6530 | 180.364 |
| 2.6180 | -8.6096 | -8.5844 | -0.0504 | 3.5844 | -3.1126 | 7.0844 | 12.1580 | 220.545 |
| 2.8798 | -9.4055 | -9.7782 | 0.7455 | 4.7782 | -3.0160 | 6.5899 | 13.5675 | 259.987 |
| 3.1416 | -10.0889 | -10.803 | 1.4289 | 5.8033 | -2.5711 | 5.8033 | 14.7817 | 294.507 |
| 3.4034 | -10.6133 | -11.589 | 1.9533 | 6.5899 | -1.8082 | 4.7782 | 15.7152 | 320.312 |
| 3.6652 | -10.9429 | -12.084 | 2.2829 | 7.0844 | -0.7792 | 3.5844 | 16.3028 | 334.638 |
| 3.9270 | -11.0554 | -12.253 | 2.3954 | 7.2531 | 0.4456 | 2.3033 | 16.5033 | 336.209 |
| 4.1888 | 10.9429 | -12.084 | 2.2829 | 7.0844 | 1.7829 | 1.0222 | 16.3028 | 325.406 |
| 4.4506 | -10.6133 | -11.589 | 1.9533 | 6.5899 | 3.1416 | -0.1715 | 15.7152 | 304.110 |
| 4.1724 | -10.0889 | -10.803 | 1.4289 | 5.8033 | 4.4289 | -1.1967 | 14.7817 | 275.265 |
| 4.9742 | -9.4055 | -9.7782 | 0.7455 | 4.7782 | 5.5572 | -1.9833 | 13.5675 | 242.279 |
| 5.2360 | -8.6096 | -8.5844 | -0.0504 | 3.5844 | 6.4496 | -2.4778 | 12.1580 | 208.405 |
| 5.4978 | -7.7556 | -7.3033 | -0.9044 | 2.3033 | 7.0453 | -2.6464 | 10.6530 | 176.250 |
| 5.7596 | -6.9015 | -6.0222 | -1.7585 | 1.0222 | 7.3037 | -2.4778 | 9.1596 | 147.518 |
| 6.0214 | -6.1056 | -4.8285 | -2.5544 | -0.1715 | 7.2071 | -1.9833 | 7.7841 | 123.023 |
| 6.2832 | -5.4222 | -3.8033 | -3.2378 | -1.1967 | 6.7622 | -1.1967 | 6.6231 | 102.941 |
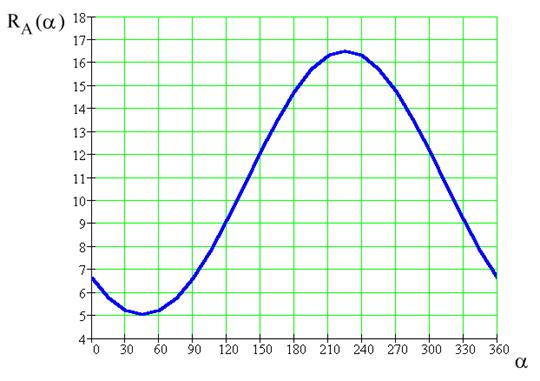
Рис. С5ж
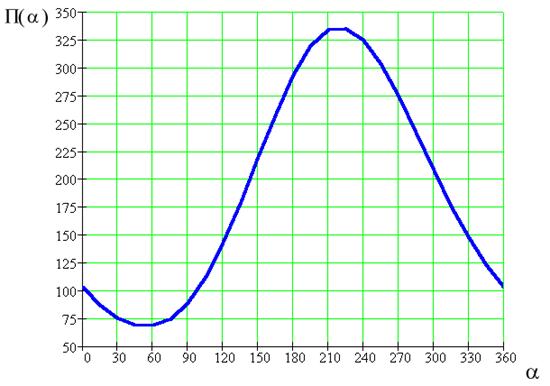
Рис. С5з
Табл. С5.2 содержит результаты вычислений, а на рис. С5ж и С5з представлены графики зависимостей RA = RA(a) и П = П(a), построенные по этим результатам.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1114; Нарушение авторских прав?; Мы поможем в написании вашей работы!