КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Примеры конструкций приводов главного движения
|
|
|
|
В приложении 7.1. приведена развертка (продольный разрез) главного привода токарного станка модели 1740РФ3 (мощность двигателя 37 кВт, максимальная частота вращения шпинделя 1600 мин-1). Коробка скоростей обеспечивает 4 механические ступени за счет комбинации включения двух подвижных двойных блоков зубчатых колес. Радиальными опорами шпинделя являются двухрядные роликоподшипники; осевые нагрузки воспринимает шариковый упорно-радиальный подшипник, установленный вблизи передней опоры.
В приложении 7.2. дан поперечный разрез (свертка) этого привода (разрез Б – Б, см. прил.7.1.). На нем, помимо валов и зубчатых колес, видны механизмы переключения блоков. Разрез В – В, показывающий конструкцию механизма переключения, приведен в приложении 7.3.
В приложении 7.4. приведена развертка главного привода расточного станка модели 2627ПМФ4 (мощность двигателя 30 кВт, максимальная частота вращения шпинделя 2500 мин-1). Привод имеет 2 механические ступени, обеспечиваемые перемещением в осевом направлении промежуточного вала-шестерни. Полый шпиндель установлен на конических роликоподшипниках с управляемым натягом.
Главный привод многооперационного станка модели 6560МФ3 сверлильно-фрезерно-расточной группы показан в приложении 7.5. (мощность двигателя 15 кВт, максимальная частота вращения шпинделя 2000 мин-1). Число механических ступеней привода 3. Конструкция шпинделя аналогична представленной в прил. 7. 1.
Развертка главного привода специального фрезерного станка модели 16ФСП дана в прил. 7.6. (мощность двигателя 15 кВт, максимальная частота вращения шпинделя 2500 мин-1). Привод имеет сложенную структуру - в двух низших диапазонах вращение от двигателя к шпинделю передается через две пары зубчатых передач, а в третьем, высокоскоростном, только через клиноременную передачу.
Примеры конструкций приводов главного движения различных станков можно найти в работах [15, 18].
7.11. КОНСТРУКТИВНОЕ ОФОРМЛЕНИЕ ПОСАДОЧНЫХ МЕСТ
Шероховатость посадочных поверхностей в местах установки подшипников на валу и в корпусе должна соответствовать по ГОСТ 2789—73 Ra = 1,25...3,2 мкм. Такую шероховатость целесообразно получать шлифованием. Для выхода шлифовальных кругов выполняют канавку: по рис. 7.53, а, б — при шлифовании поверхности вала; по рис. 7.53, в—при шлифовании отверстия в корпусе. Размеры канавок (мм) приведены в табл. 7.8.
Таблица 7.8
| d | b | h | R | R1 |
| св. 10 до 50 | 0,25 | 1,0 | 0,5 | |
| св. 50 до 100 | 0,5 | 1,6 | 0,5 | |
| св. 100 | 0,5 | 2,0 | 1,0 |
При высокой напряженности вала переходную поверхность выполняют галтелью постоянного радиуса (рис. 7.54). Радиус r1 галтели принимают меньше координаты фаски r кольца подшипника:
| r, мм........... 1,0 1,5 2,0 2,5 3,0 3,5 r1 mах, мм...... 0,6 1 1 1,5 2 2 |
В подшипниковом узле контакт смежных с подшипником деталей необходимо предусматривать только по торцам подшипниковых колец, на высоте заплечика. Другие поверхности смежных деталей должны отстоять от торцов колец для всех типов подшипников (кроме конических роликовых) не менее чем на 2—3 мм (размер а на рис. 7.55).
Особенностью конструкции конического роликового подшипника является то, что сепаратор выступает за пределы наружного кольца на величины «m» и «n», рис. 7.56, а. Это следует учитывать при установке смежных с подшипниками деталей, например, шлицевых гаек (рис. 7.56, 6) или при установке двух рядом расположенных подшипников (рис. 7.56, в). Смежная деталь должна отстоять от торца наружного кольца конического роликоподшипника на b = 3...6 мм. Чтобы цилиндрические поверхности смежных деталей не касались сепаратора, высоты h1 и h2 не должны превышать значений:
h1 = 0,1(D - d); h2 = 0,05(D - d).
Именно поэтому в очень распространенном креплении конического подшипника круглой шлицевой гайкой (рис. 7.56, б) между торцами внутреннего кольца подшипника и гайки устанавливают дистанционное кольцо 1. Примерно половиной своей длины кольцо 1 заходит на вал диаметром d, выполненным под установку подшипника, а оставшейся длиной перекрывает канавку для выхода инструмента при нарезании резьбы.
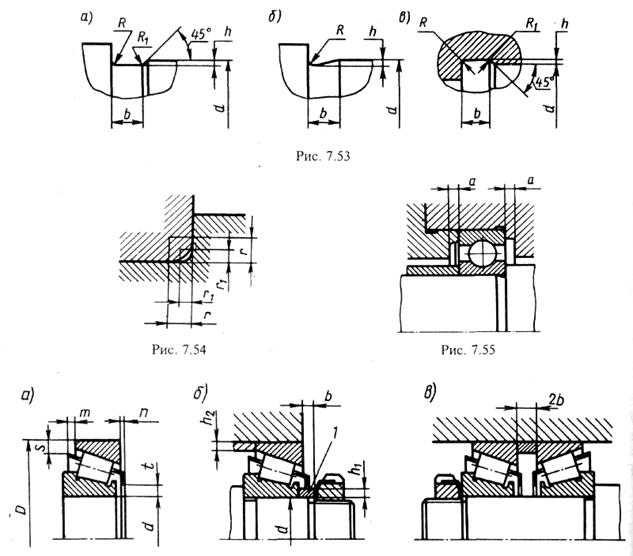
Рис. 7.56
7.12. ВЫЧЕРЧИВАНИЕ ВНУТРЕННЕЙ КОНСТРУКЦИИ ПОДШИПНИКОВ
Для изображения стандартных подшипников качения по габаритным разме- рам d, D и В следует нанести тонкими линиями внешний контур. Затем всех типов подшипников (кроме конических роликовых) откладывают диаметр
Dpw = 0,5(D + d) окружности расположения центров тел качения. По соотношениям рис. 7.57, а —д изображают тела качения и кольца.
Радиалъно-упорные шарикоподшипники (рис. 7.57, б) имеют на наружном кольце только один борт. Второй борт срезан. Для вычерчивания наружного кольца со стороны срезанной части проводят вспомогательную вертикальную линию до пересечения с окружностью шарика в точке 1.Соединяют точки 1 и 2.
В подшипниках шариковых радиальных двухрядных сферических (рис. 7.57, в) тела качения изображают так, чтобы они касались боковых линий внешнего контура. Сферическую поверхность на наружном кольце изображают дугой окружности с центром на оси отверстия подшипника.
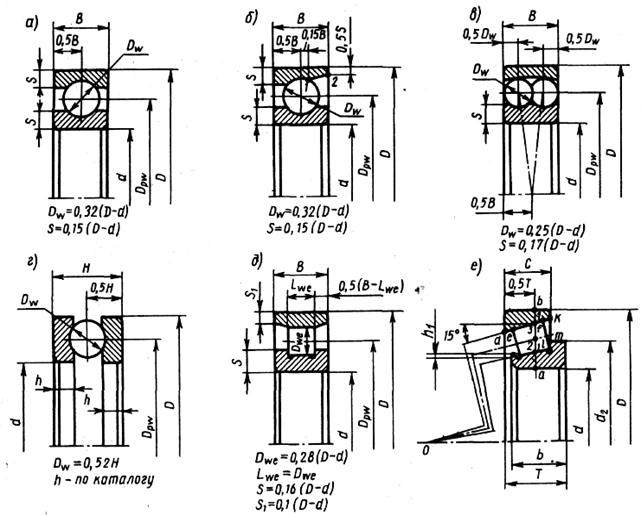
Для построения конических роликоподшипников (рис. 7.57, е) на контур подшипника наносят вспомогательную вертикальную линию, делящую монтажную высоту Г подшипника пополам. Отрезок ab делят точками 1, 2 и 3 на четыре равные части. Из точки 3 под углом α = 15° проводят образующую конуса до ее пересечения с осью вращения подшипника в точке 0. Из этой точки проводят линии 01 и 02. Откладывают отрезок fk = 0,05(D - d) и проводят линию fm перпендикулярно линии 02. Отложив отрезок de, равный fk, проводят параллельно fm линию, оформляющую малый торец ролика. Для получения диаметра d2 борта внутреннего кольца находят точку l, которая делит радиус большего торца ролика пополам. Высота h1 малого борта внутреннего кольца h1 = 0,124DW, где Dw =fm — наибольший диаметр ролика.
Сепараторы на чертежах подшипников не изображают.
7.13. ПРИМЕРЫ КОНСТРУКЦИЙ ПОДШИПНИКОВЫХ УЗЛОВ МАШИН
Осевое фиксирование вала в одной опоре (схема la, рис. 3.9) широко применяют в станках, автомобилях, тракторах: рис. 7.58, 7.59.
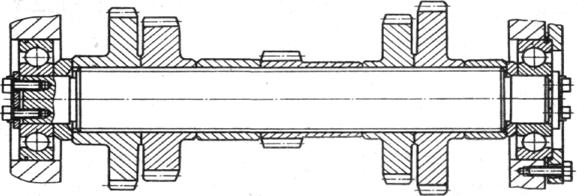
Рис. 7.58
На рис. 7.58 представлен вал коробки скоростей продольно-фрезерного станка. Подшипники обеих опор закреплены на валу концевыми шайбами; подшипник фиксирующей опоры крепят в корпусе крышкой через плоское пружинное кольцо, расположенное в канавке наружного кольца подшипника.
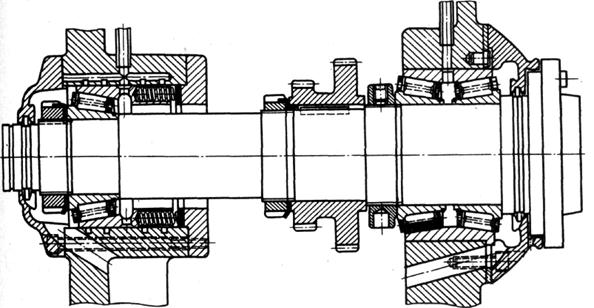
Рис. 7.61
Осевое фиксирование валов в одной опоре двумя подшипниками или одним сдвоенным подшипником (схема 16) применяют для червяков червячных передач и валов конических шестерен, для шпинделей станков и в других случаях: рис. 7.60, 7.61.
На рис. 7.60 показан шпиндель токарного станка, установленный на подшипниках фирмы «Гаме» (Франция). Зазоры в подшипнике плавающей опоры выбирают пружинами, расположенными в отверстиях наружного кольца. Регулирование фиксирующей опоры проводят гайкой. Отечественная промышленность также выпускает подобные подшипники (тип 17000).
Для шпиндельных опор станков с ЧПУ и обрабатывающих центров применяют конические роликоподшипники с управляемым зазором-натягом (тип 117000). В таких подшипниках подвижный по наружному кольцу борт прижимают к роликам давлением масла от гидросистемы станка, что позволяет регулировать натяг в зависимости от действующей на шпиндель нагрузки и частоты его вращения.
3.1. ДИАМЕТРЫ ВАЛОВ
Предварительные значения диаметров (мм) различных участков стальных валов редуктора определяют по формулам:
для быстроходного (входного) вала (рис. 3.1, а)
d ≥ (7...8)  , dП ≥ d + 2tцил(tкон), dБП ≥dп + 3r;
, dП ≥ d + 2tцил(tкон), dБП ≥dп + 3r;
для промежуточного (рис. 3.1, б)
dк ≥(6...7)  , dБК≥dк + 3f, dБП ≥dП + 3r;
, dБК≥dк + 3f, dБП ≥dП + 3r;
dП = dK- 3r (исп. I), dП ≤к (исп. II);
для тихоходного (выходного) (рис. 3.1, в)
d ≥ (5...6)  , dП ≥ d + 2tцил(tкон), dБП ≥dП + 3r, dK ≥dБП,
, dП ≥ d + 2tцил(tкон), dБП ≥dП + 3r, dK ≥dБП,
Для двухваловых коробок передач принимают: d≥ (6...7)  .
.
В приведенных формулах ТБ, ТПР, ТТ — номинальные моменты, Н • м. Большие значения d и dK принимают для валов на роликоподшипниках, для валов шевронных передач и промежуточных валов соосных передач при твердости колеса выше 55 HRC.
Вычисленные значения диаметров округляют в ближайшую сторону до стандартных (см. табл. 24.1).
Диаметры концов быстроходного и тихоходного валов согласуют с диаметрами валов по табл. 24.27; 24.28 и с диаметрами отверстий устанавливаемых на них деталей (шкива, звездочки, полумуфты).
Высоту t цил(tкон) заплечика, координату r фаски подшипника и размер/(мм) фаски колеса f принимают в зависимости от диаметра d:
| d....17-22 24-30 32-38 40-44 45-50 52-58 60-65 67-75 80-85 90-95 tцил.. 3 3,5 3,5 3,5 4 4,5 4,6 5,1 5,6 5,6 tкон..1,5 1,8 2,0 2,3 2,3 2,5 2,7 2,7 2,7 2,9 r….. 1,5 2 2,5 2,5 3 3 3,5 3,5 2,7 4 f….. 1 1 1,2 1,2 1,6 2 2 2,5 2,5 3 Примечание. Координата фаски г дана приближенно, точное значение dn и г см. в таблицах 24.10—24.! |
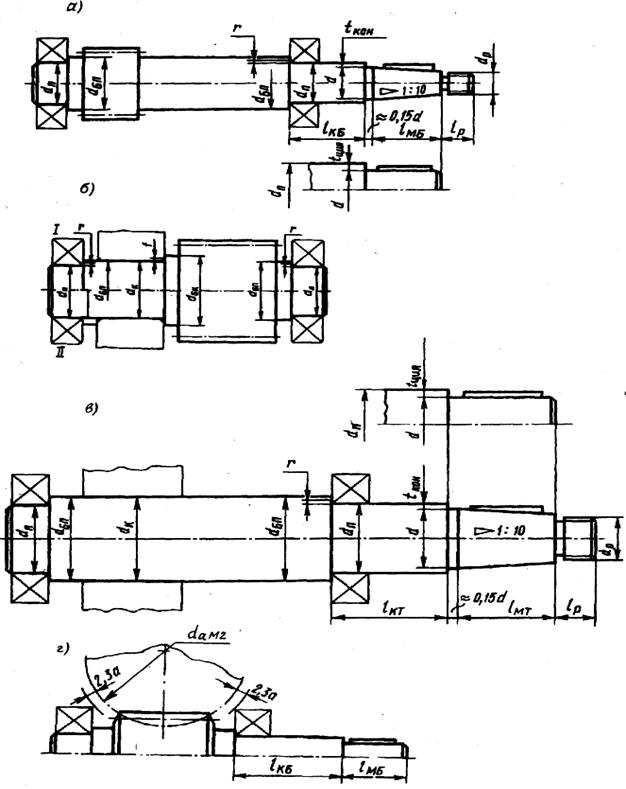
Рис. 3.1
На рис. 3.2 дан пример вычерчивания вала конической шестерни. Вершины делительных конусов и конусов впадин колеса и шестерни сходятся в точке «О» пересечения осей. Для обеспечения постоянного по всей ширине радиального зазора между зубьями колеса и шестерни образующие внешнего конуса шестерни должны быть параллельны образующим конуса впадин колеса, а образующие внешнего конуса колеса — образующим конуса впадин шестерни.

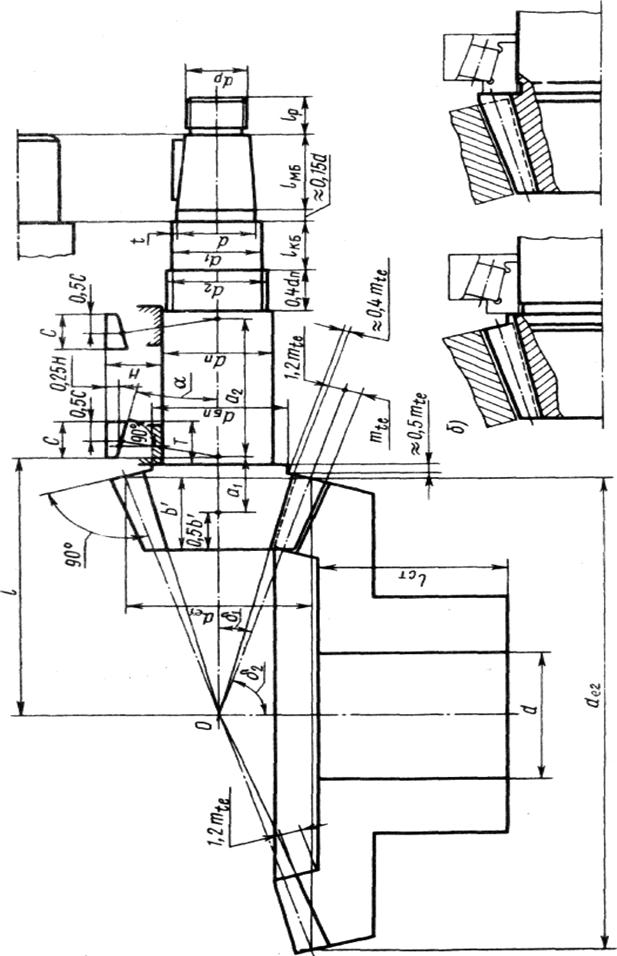
Диаметры (мм) отдельных участков вала-шестерни определяют по соотношениям (рис. 3.2, а):

где TБ —вращающий момент на валу-шестерне, Н-м; диаметр резьбы d2 = d1 + +(2...4); dn и r- — внутренний диаметр и координата фаски подшипника.
Конструкцию вала в месте расположения шестерни и расстояние между подшипниками определяют прочерчиванием. Проводят под углом δ2 линии — образующие делительного конуса шестерни, откладывают внешний делительный диаметр de1,.B точках пересечения восстанавливают перпендикуляры к образующим делительного конуса; откладывая размеры l,2mte и mte, формируют зубья на внешнем дополнительном конусе (mte—торцовый внешний модуль). Далее по размерам dбп, 0,5mte и 0,4mte оформляют базовый для подшипника заплечик вала.
Параметры α, Т и С для построения конических роликовых подшипников принимают по табл. 24.16—24.18. От базового заплечика откладывают монтажную высоту Т подшипника, затем ширину С наружного кольца (рис. 3.2). Для оформления поверхности контакта наружного кольца с роликом наносят точку с координатами 0,5 С; 0,25H, через которую проводят линию под углом α. В этой же точке восстанавливают перпендикуляр до его пересечения с осью вала: получают размеры а1 и l.
Из условия обеспечения необходимой жесткости узла следует выдерживать соотношение d ≥1,3а1 и в качестве расстояния a2 принимать большее из двух значений

При больших передаточных числах (i > 3,15) коническая шестерня имеет малые размеры. Тогда упорный заплечик выполняют по рис. 3.2, б.
Иногда ближний к шестерне подшипник применяют с большим диаметром посадочного отверстия, чем дальний (см. ниже рис. 7.40, 12.5; 12.6).
3.2. РАССТОЯНИЯ МЕЖДУ ДЕТАЛЯМИ ПЕРЕДАЧ
Чтобы поверхности вращающихся колес не задевали за внутренние поверхности стенок корпуса, между ними оставляют зазор «а», мм (рис. 3.3 — 3.7):
где L — расстояние между внешними поверхностями деталей передач, мм.
Вычисленное значение а округляют в большую сторону до целого числа. В дальнейшем под а будем понимать также расстояние между внутренней поверхностью стенки корпуса и торцом ступицы колеса.
Расстояние b0 между дном корпуса и поверхностью колес или червяка для всех типов редукторов и коробок передач принимают: bo≥ 3а.
Расстояние между торцовыми поверхностями колес двухступенчатого редуктора, выполненного по развернутой схеме, принимают с = (0,3...0,5)a.
В двухступенчатых соосных редукторах между торцовыми поверхностями шестерни быстроходной ступени и колеса тихоходной ступени расположены два подшипника опор соосных валов. Расстояние /, между зубчатыми колесами определяют по соотношению ls = 3а + B1 +B2 (рис. 3.4). Здесь В1 и В2 — ширины подшипников опор быстроходного и тихоходного валов (табл. 24.10 — 24.18).
16.2. НАПРАВЛЯЮЩИЕ СКАЛКИ. РЫЧАГИ, ОСИ И РУКОЯТКИ УПРАВЛЕНИЯ
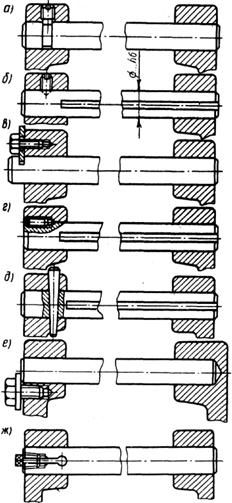 Рис. 16.7
Рис. 16.7
Вилки перемещают по направляющим малкам, которые чаще всего выполняют одного диаметра с полем допуска И6 по всей длине. Отверстие в корпусе для скалки изготовляют с полем допуска Н7, а отверстие в вилке — Б9. Крепление направляющих скалок в корпусе показано на рис. 16.7, а — ж.
Иногда необходимо, чтобы вилка переключения не поворачивалась на направляющей скалке. Тогда скалку жестко крепят в корпусе (варианты б, г, d), а вилку соединяют со скалкой направляющей шпонкой или шлицами.
Рычаги 1 (рис. 16.1 и 16.8) обычно выполняют литыми из серого чугуна. Форма рычагов в зависимости от компоновки деталей в узле может быть различной и нередко довольно сложной. Изготовляют рычаги овального или прямоугольного сечения, без ребер или с ребрами жесткости. Размеры концов рычагов 7, надеваемых на оси (рис. 16.9, а), выполняют по соотношениям

где d — диаметр отверстия в бобышке (поле допуска H7}.
Обычно рычаг 1 и рукоятку управления устанавливают на общей оси. Некоторые варианты такого исполнения даны на рис. 16.9: вариант (а) наиболее простой, недостатком его является необходимость обработки внутреннего торца прилива корпуса; в варианте (б) этот недостаток устранен применением чугунной втулки, вставленной в корпус; в варианте (в) для этой же цели ось выполнена ступенчатой; интересно конструктивное решение в варианте (г). Здесь ось имеет одинаковый диаметр по всей длине, что упрощает ее изготовление. Шайбу 2 надевают на ось, а затем сдвигают в канавку поперек оси, и в таком положении она удерживает ось от смещений. Для лучшей устойчивости механизма желательно, чтобы длина l была в 2...2,5 раза больше диаметра оси.
Если рычаг 1 по условиям компоновки узла располагают вдали от стенки корпуса, для него создают вторую опору (рис. 16.10).
Рукоятки управления обычно делают сборными — ступица (рис. 16.11), стержень (рис. 16.12) и ручка (рис. 16.13) — и очень редко — цельнолитыми. Размеры ступиц (мм) (рис. 16.11):
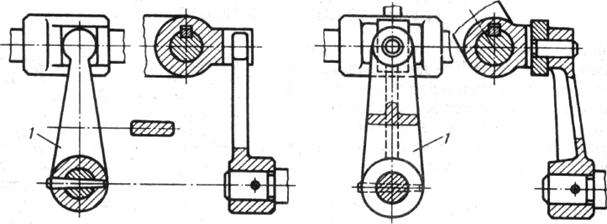
Рис. 16.8
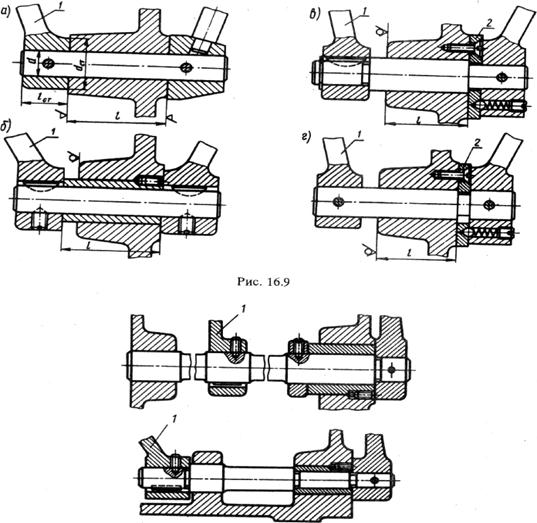
Рис. 9.5. Сильфонная муфта
| Табл. 9.4. Параметры сильфонных соединительных муфт | |||||
| Тип муфты | |||||
| Исполнения втулок | |||||
| Номиналь- Максималь- Момент ный мо- ный допусти- инерции, мент, мый враща- кг-м2 Нм ющий момент, двигателя, Нм | Размеры, мм | ||||
| L D d 2 | |||||
| KSS8 | А1, А, В | 80 160 0,0005 82 | 93 82 50 | ||
| KSS10 | А1, А, В | 100 200 0,0012 90 • | 96 90 50 | ||
| KSS17 | А, В | 170 340 0,0006 82 | 97 82 50 | ||
| KSS20 | А, В | 200 400 0,0014 90 | 97 90 50 | ||
| KSS27 | А, В, С | 270 540 0,0026 101 | 116 101 62 | ||
| KSS32 | А, В, С | 320 640 0,0028 101 | 116 101 62 | ||
| KSS52 | C, D | 520 1040 0,0038 122 | 127 122 70 | ||
| KSS62 | C, D, E | 620 1240 0.0108 132 | 129 132 80 | ||
Приложения
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 1439; Нарушение авторских прав?; Мы поможем в написании вашей работы!