КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция №13 Регулирование скорости вращения асинхронных двигателей
|
|
|
|
Цель лекции:
- ознакомить студентов изменением напряжения;
- с регулированием скорости асинхронного двигателя
- с регулированием скорости вращения изменением скольжения;
- с регулированием скорости вращения изменением числа пар полюсов двигателя.
Содержание лекции:
- регулирование скорости асинхронного двигателя
изменением напряжения;
- регулирование скорости вращения изменением скольжения;
- регулирование скорости вращения изменением числа пар полюсов двигателя.
Асинхронный двигатель, как правило, используется в электроприводе с постоянной скоростью вращения, однако в ряде случаев требуется эту скорость регулировать.
Из формулы s=  следует, что скорость вращения ротора
следует, что скорость вращения ротора
асинхронного двигателя
Таким образом, чтобы изменить скорость вращения ротора, необходимо изменить либо скольжение s, либо скорость вращения поля статора n1. Последнее достигается изменением числа пар полюсов обмотки статора или же частоты тока в обмотке статора.
Перечисленные способы имеют существенные недостатки, и поэтому было предложено большое число соединений (каскадов) асинхронного двигателя с другими электрическими машинами для получения необходимых характеристик скорости.
а) Изменение скольжения
Проще всего регулирование скольжения осуществляется в двигателе с фазной обмоткой ротора введением добавочного активного сопротивления (см. рисунок 13.1). Процесс регулирования скорости вращения ротора этим способом рассматривается при постоянстве подведенного, к двигателю напряжения U1 и частоты f. Момент М2 считается также постоянным.
При отсутствии добавочного сопротивления в цепи ротора скольжение двигателя в установившемся режиме определяется точкой А пересечения линии нагрузочного момента (Мт) и характеристики скорости 1 (см. рисунок 13.1), соответствующей скорости вращения n'. Если ввести сопротивление в цепь ротора, то U1 останется постоянным согласно условию; следовательно, останутся постоянными э.д.с. Е1 и поток Фбт. Так как ротор обладает инерцией, то в ближайший момент времени после введения реостата скорость вращения ротора останется прежней и соответственно этому сохраняется величина э. д. с. ротора E2s=E2s. Ток ротора
уменьшается вследствие увеличения сопротивления цепи ротора до значения r2+rd, а это приводит к уменьшению вращающего момента ротора.

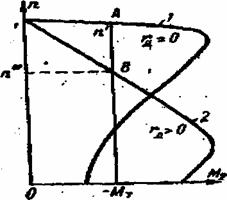
Рисунок 13.1 - Скорость вращения при различных сопротивлениях цепи
Так как нагрузочный момент Мт остается постоянным, то он будет превышать вращающий момент, на валу двигателя появится отрицательный динамический момент Mj = М2 + Мт и скорость вращения ротора начнет уменьшаться. Соответственно возрастающему скольжению s будет также увеличиваться э. д. с. Е2s и ток 12. Процесс уменьшения скорости вращения и увеличения тока I2 будет происходить до тех пор, пока активная составляющая этого тока I2 cosφ2 не достигнет прежнего значения. Вращающий момент М2 станет равным нагрузочному моменту (- Мт) и ротор будет вращаться с установившейся скоростью п", меньшей, чем до введения реостата (точка В характеристики).
Так как ток ротора и магнитный поток при уменьшении скорости вращения не претерпевают изменений, то ток статора I1 и cosφ также остаются без изменений, поэтому потребляемая двигателем мощность  не изменяется. Полезная мощность уменьшается вследствие уменьшения скорости вращения и при постоянном моменте М2. Следовательно, кпд двигателя
не изменяется. Полезная мощность уменьшается вследствие уменьшения скорости вращения и при постоянном моменте М2. Следовательно, кпд двигателя
уменьшается пропорционально уменьшению скорости вращения.
С уменьшением скорости вращения происходит ухудшение вентиляции двигателя, поэтому одновременно необходимо также понижать нагрузочный момент Мm.
Наклон характеристик скорости с увеличением сопротивления цепи ротора увеличивается; это понижает устойчивость работы двигателя, т. е. малые изменения нагрузочного момента вызывают большие колебания скорости вращения.
В случае резко нарастающих нагрузок «смягчение», т. е. увеличение наклона характеристики скорости желательно для использования кинетической энергии Jω 2 /2, запасенной во вращающихся частяx привода с общим моментом инерции J. При повышении нагрузки скорость вращения двигателя понижается, и динамический момент J  способствует преодолению нагрузочного момента Мт, уменьшая таким образом вращающий момент М2 двигателя. Это позволяет выбрать двигатель меньшей мощности и понизить наибольший ток статора.
способствует преодолению нагрузочного момента Мт, уменьшая таким образом вращающий момент М2 двигателя. Это позволяет выбрать двигатель меньшей мощности и понизить наибольший ток статора.
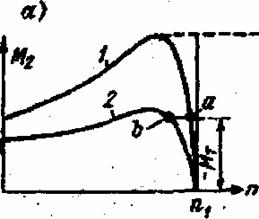
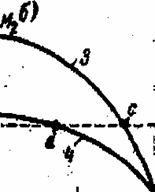
Рисунок 13.1 - Регулирование скорости асинхронного двигателя
изменением напряжения
а - при малом активном сопротивлении ротора;
б – при большом сопротивлении
Изменение скольжения может быть получено также за счет изменения подведенного к двигателю напряжения U1; однако при малом сопротивлении цепи ротора скольжение изменяется в узких пределах вследствие большого угла наклона механической характеристики. Механическая характеристика 1 построена для номинального напряжения U1H критическое скольжение SM = 0,2 (в двигателях средней и большой мощности SM значительно меньше). При уменьшении напряжения ординаты механической характеристики уменьшаются пропорционально (U1/UIH)2. Характеристика 2 соответствует уменьшению напряжения на 0,3U1H. При заданном нагрузочном моменте скольжение будет изменяться в пределах между точками а и в, т. е. скорость вращения изменится не более чем на 15%. Но при этом пусковой момент Mn, становится меньше момента (Мт), вследствие чего резко снижается перегрузочная способность двигателя.
Пределы регулирования скольжения зависят также от характера изменения нагрузочного момента от скорости вращения; эти пределы уменьшаются, если момент Мт возрастает с увеличением скорости вращения
б) Изменение числа пар полюсов
При изменении числа пар полюсов обмотки статора изменяется скорость вращения поля статора, а следовательно, и скорость вращения ротора. Число полюсов может быть только целым, поэтому изменение скорости вращения будет ступенчатым. Особенно большие ступени получаются при малом числе полюсов.
Изменение числа полюсов может быть достигнуто двумя способами: на статоре можно уложить две обмотки, каждая из которых имеет требуемое число полюсов, или же использовать одну обмотку, допускающую переключение на разное число полюсов.
В двигателе с переключением числа полюсов ротор обычно выполняется с короткозамкнутой обмоткой, так как применение фазной обмотки с переключением числа полюсов значительно усложняет изготовление ротора.
Наиболее простая схема переключения числа полюсов обмотки получается при отношении скоростей вращения 1:2.
Двухслойные обмотки предпочтительнее, так как они обеспечивают лучшую форму магнитного поля в зазоре. Шаг обмотки выбирается таким образом, чтобы он был близким к полюсному делению при большем числе полюсов. На рисунке 13.2 представлена схема обмотки, фаза которой состоит из двух катушек АВ и CD. Показанное на рисунке 13.2,анаправление тока при соединении конца катушки В с началом катушки С создает четыре полюса. При изменении направления тока в катушке CD получается два полюса (см. рисунок 13.2 б ). Изменение направления тока в катушке CD может быть получено и при параллельном соединении катушек (см. рисунок 13.2, в). При этом требуется только три выведенных конца вместо четырех а при внутреннем соединении трехфазной обмотки звездой или треугольником только шесть концов. При изменении числа полюсов может изменяться также индукция в зазоре и приблизительно пропорционально ей - вращающий момент двигателя.
Индукция в зазоре зависит от величины вращающегося магнитного потока и полюсного деления. Магнитный поток определяется приложенным к обмотке напряжением, числом последовательно соединенных витков и обмоточным коэффициентом.
При одинаковом фазном напряжении магнитный поток при параллельном соединении будет в 2,5 раза больше, чем при последовательном (в два раза за счет половинного числа последовательно соединенных витков ив 1,25 раза за счет меньшего обмоточного коэффициента). При переходе от удвоенного числа полюсов к меньшему полюсное деление увеличивается в два раза. Таким образом, индукция в зазоре Bб и, следовательно, вращающий момент при переходе к большей скорости вращения возрастает в 1,25 раза. Соединение фазных обмоток при высшей скорости вращения в этом случае выполняется звездой с двумя параллельными ветвями (YY), а при низшей - звездой (Y).
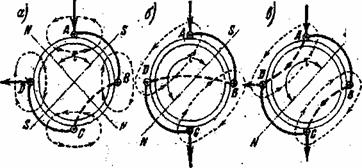
Рисунок 13.2 - Регулирование скорости вращения изменением числа пар полюсов двигателя
Эта схема переключения обмоток пригодна для двигателей привода вентиляторов.
Для получения приблизительно одинакового вращающего момента при обеих скоростях вращения, например, у двигателя для привода компрессора; применяется схема соединения обмоток YY/A. В этом случае фазное напряжение при переходе к высшей скорости вращения уменьшается в-  , следовательно, магнитный поток увеличивается только в 1,45 раза. Вследствие увеличения полюсного деления в два раза индукция в зазоре и вращающий момент при высшей скорости вращения составляют 0,7 индукции и момента при низшей скорости. Увеличение вращающего момента может быть достигнуто за счет соответствующего выбора шага обмотки и повышения плотности тока при высшей скорости вращения.
, следовательно, магнитный поток увеличивается только в 1,45 раза. Вследствие увеличения полюсного деления в два раза индукция в зазоре и вращающий момент при высшей скорости вращения составляют 0,7 индукции и момента при низшей скорости. Увеличение вращающего момента может быть достигнуто за счет соответствующего выбора шага обмотки и повышения плотности тока при высшей скорости вращения.
При необходимости сохранения одинаковой мощности на обеих ступенях скорости вращения (для привода металлорежущих станков) применяется схема переключения обмотки ∆/YY.
в) Изменение частоты питающей сети
Этот способ применяется в тех случаях, когда требуется регулировать скорость вращения одного или нескольких двигателей одновременно или получить скорость вращения более 3000 об/мин.
В качестве примера можно привести привод гребных винтов на судах, привод двигателей в деревообделочной промышленности со скоростью вращения 12000 об/мин, привод электрошпинделей для шлифовки со скоростью вращения до 150 000 [об/мин.
При питании двигателей от синхронного генератора изменение частоты достигается изменением скорости приводного двигателя. Это возможно только в сравнительно узких пределах. Существуют специальные схемы, которые позволяют регулировать частоту тока без изменения скорости приводного двигателя.
С изменением частоты тока будут изменяться в общем случае все величины, характеризующие работу двигателя: напряжение на зажимах, поток, ток холостого хода, вращающий момент, мощность, перегрузочная способность, скорость вращения. Анализ этого способа регулирования скорости отличается значительной сложностью. Поэтому приводятся только конечные результаты без вывода их.
Пусть поставлено условие, чтобы двигатель работал при переменной частоте, но с практически постоянными значениями кпд, cos<p, перегрузочной способности Мт. и постоянным абсолютным скольжением s. Если двигатель не насыщен, то поставленные условия соблюдаются при следующем соотношении между напряжением, частотой и вращающим моментом:
 ,
,
где U 1 и М 1, — напряжение и вращающий момент при частоте f1; U 11и М11 - те же величины при частоте f11.
Если М1=М11 = const, то  , т. е. напряжение, подводимое к двигателю, должно изменяться пропорционально частоте.
, т. е. напряжение, подводимое к двигателю, должно изменяться пропорционально частоте.
При использовании в качестве источника электроэнергии синхронного генератора изменение частоты и напряжения получается при постоянном возбуждении и изменяющейся скорости вращения.
Если двигатель работает на центробежный вентилятор или нагребной винт, то M2=f2. В этом случае  , т. е. напряжение на зажимах должно изменяться пропорционально частоте во второй степени. Этот режим соответствует работе синхронного генератора с током возбуждения, изменяющимся пропорционально скорости вращения.
, т. е. напряжение на зажимах должно изменяться пропорционально частоте во второй степени. Этот режим соответствует работе синхронного генератора с током возбуждения, изменяющимся пропорционально скорости вращения.
Иногда подобное регулирование частоты применяется для пуска крупных асинхронных двигателей.
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 1817; Нарушение авторских прав?; Мы поможем в написании вашей работы!