КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Математические модели движения ЛА на примере самолета
|
|
|
|
Матмодель пространственного движения самолета.
Как было оговорено ранее, движение ЛА в воздушном пространстве будем представлять как движение абсолютно твердого тела, имеющего шесть степеней свободы. Принимая это во внимание, можем рассмотреть: движение самолета вместе с центром масс (поступательное) и движение самолета вокруг центра масс (вращательное).
При получении матмодели пространственного движения самолета вначале необходимо ввести ряд допущений, которые позволят упростить процедуру вывода, что в дальнейшем позволит получать уравнения наиболее применимые для практической реализации.
Основные допущения:
-- самолет – абсолютно твердое тело, с постоянными массовыми и инерционными характеристиками,
-- оси связанной системы координат совпадают с главными осями инерции ЛА, так как центробежные моменты инерции ЛА равны 0,
-- вектор сил тяги считается приложенным в центре масс ЛА, то есть, данный вектор не создает момента, относительно какой-либо из осей,
-- форма земной поверхности считается плоской, также не учитывается движение земной поверхности в инерциальном пространстве,
-- воздушная среда считается неподвижной.
Используя вышесказанное, уравнения самолета как твердого тела могут быть описаны с помощью теоремы об изменении количества движения (поступательное движение) и теоремы об изменении моментов количества движения (вращательное движение).
Теорема об изменении количества движения:
 (II закон Ньютона) (4.1)
(II закон Ньютона) (4.1)
Теорема об изменении кинетического момента:
 (4.2)
(4.2)
K – вектор момента количества движения,
M – главный вектор момента (геометрическая сумма всех моментных усилий, действующих на ЛА)
Из теоремы можно получить скалярные уравнения, описывающие 6 степеней свободы ЛА. Уравнения поступательного движения – проекции векторного уравнения 4.1 на оси траекторной СК. Уравнения вращательного движения – проекции 4.2 на оси связанной СК.
Полученные шесть уравнений дополняются геометрическими уравнениями для определения углов атаки, скольжения и угла скоростного крена, кинематическими уравнениями для определения угла наклона траектории и угла пути, а также уравнениями траекторного движения для определения пространственного положения центра масс.


- 











Выведение уравнений сил.
При выведении уравнений сил будем использовать известную формулу векторного анализа, которая описывает производную вектора а в неподвижной СК как сумму производной вектора в подвижной СК и векторного произведения а на угловую скорость вращения подвижной СК.
 xA (4.3)
xA (4.3)
Используя формулу 4.3 запишем первое векторное уравнение 4.1, как уравнение сил в проекция на оси связанной СК:

 (4.4)
(4.4)

В этом уравнении Fx, Fy, Fz – проекции главного вектора внешних сил на оси связанной СК. Vx, Vy, Vz – проекции вектора скорости центра масс ЛА на оси связанной СК. Поскольку в траекторной СК приведенные уравнения сил 4.4 имеют более простой вид, что связано с тем, что ось ОХк совпадает с вектором скорости ЛА, а проекции вектора скорости ЛА на оси ОУк, ОZк равны 0, то перепроектируем 4.4 в траекторную СК:

 (4.5)
(4.5)
Fxк, Fyк, Fzк – проекции главного вектора внешних сил на оси траекторной СК, ωyk и ωzk – проекции вектора абсолютной угловой скорости на оси ТСК.
Раскрывая правые части 4.5 будем учитывать: силу тяги двигателя (Р), силу веса ЛА (G), полную аэродинамическую силу (R), состоящую из подъемной силы (Ya), силы лобового сопротивления (Xa) и боковой аэродинамической силы (Za).



Аэродинамические силы определяются в СкСК и направлены по соответствующим осям этой СК. При этом направление силы лобоыого сопротивления совпадает с отрицательным направлением оси ОХа, которая в свою очередь совпадает с ОХк ТСК. СкСК наклонена относительно ТСК на угол скоротного крена γа. Поэтому проекции R на оси ТСК определяются следующим образом.

 (4.6)
(4.6)

Вектор силы тяги Р совпадает с направлением продольной оси ЛА, поэтому его проекцию на оси ТСК можно получить с помощью матрицы перехода от СвСК к ТСК
 (4.7)
(4.7)
Направление вектора силы тяжести G совпадает с отрицательным направлением оси ОУg, которая наклонена относительно горизонтальной плоскости горизонта на угол θ. Поэтому проектируя вектор силы тяжести на оси ТСК получим:
 (4.8)
(4.8)

Используя соотношения 4.6, 4.8, 4.9, запишем уравнения сил в ТСК:

-
(4.10)


Выведение уравнений моментов.
Уравнения моментов служат для описания вращательного движения ЛА. Для их выведения будем использовать теорему об изменении момента количества движения:
 (4.11)
(4.11)
Используя формулу для определения полной производной вектора в проекциях на оси СвСК, найдем проекции векторного выражения 4.11 на оси СвСК.

 (4.12)
(4.12)

При записи уравнений в СвСК воспользуемся тем допущением, что оси СвСК совпадают с главными центральными осями самолета, при этом ненулевыми моментами инерции будут только осевые. Таким образом 4.12 имеет вид:

 (4.13)
(4.13)

Используя системы 4.10 и 4.13 получена система уравнений, описывающих 6 степеней свободы нашего самолета.
Для того, чтобы замкнуть систему необходимо получить дополнительные соотношения для определения параметров полета, от которых зависят правые части полученных уравнений сил и моментов.
Геометрические уравнения.
Для определения угла атаки, скольжения и скоростного крена, которые необходимы для определения сил и моментов, действующих на самолет, используются геометрические соотношения, полученные приравниванием соответствующих матриц направляющих косинусов.
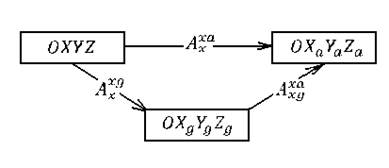
(рис.4.1)


1) 
2) 
3) 





Перепишем все системы уравнений, необходимые нам в будущем:
-

|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 5200; Нарушение авторских прав?; Мы поможем в написании вашей работы!