КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Проверка сопряжений деталей
|
|
|
|
Мы подошли к стадии проверки правильности сопряжений всех деталей в каждой из сборок.
Анализируя сборку Рычагов система, видим, что у нас присутствуют только необходимые и достаточные сопряжения.
В сборке Тележка необходимо дополнительно зафиксировать центр тяжести колес, движение которых пока ничем не ограничено.
Заметим, что достаточно ввести все нужные ограничения для одного колеса (деталь Колесо 1), на остальные колеса соответствующие ограничения распространятся автоматически в силу зеркальных связей между Колесом 1 и остальными колесами.
Прежде всего, вводим сопряжение концентричности между колесом Колесо 1 и его осью вращения (деталь Ось).
80. Для этого создадим Плоскость 4, проходящую через одну из граней этого колеса, перпендикулярных оси вращения, согласно рисунку 3.117.
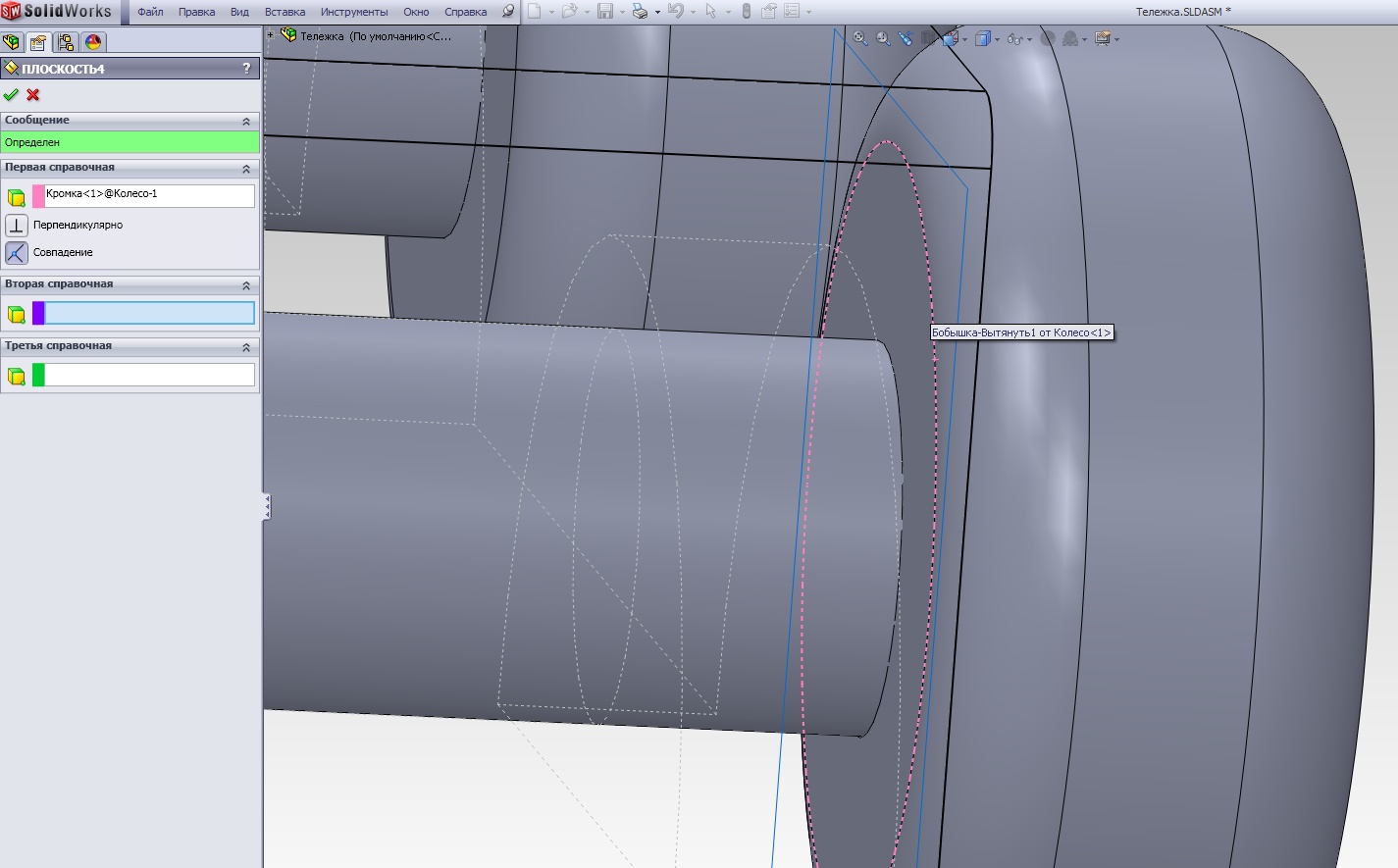
Рис.3.117
Несмотря на то, что центр тяжести колеса еще не фиксирован, все же положение этой плоскости будет зафиксированным (особенность работы системы SW). Действительно, если мы сместим в сборке деталь Колесо 1, как показано на рисунке 3.118, положение Плоскости 4 не изменится – она останется жестко привязанной к системе координат сборки Тележка.
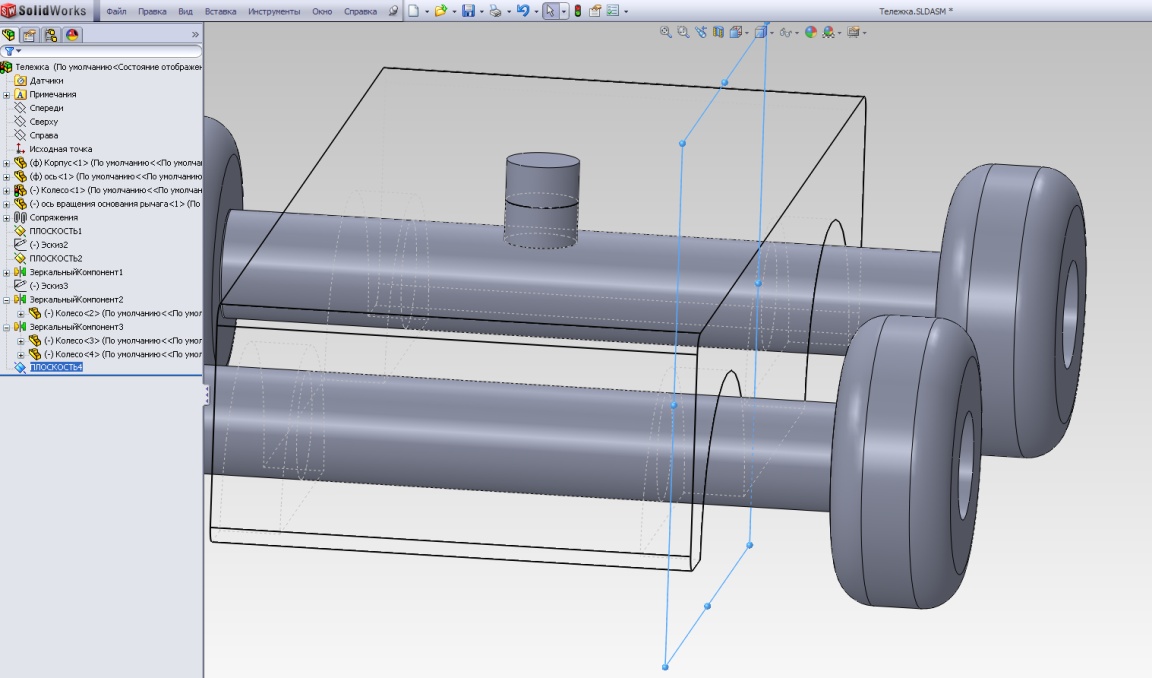
Рис.3.118
81. Теперь создадим сопряжение Совпадения между введенной плоскостью и Колесом 1. Эта операция иллюстрируется рисунком 3.119.
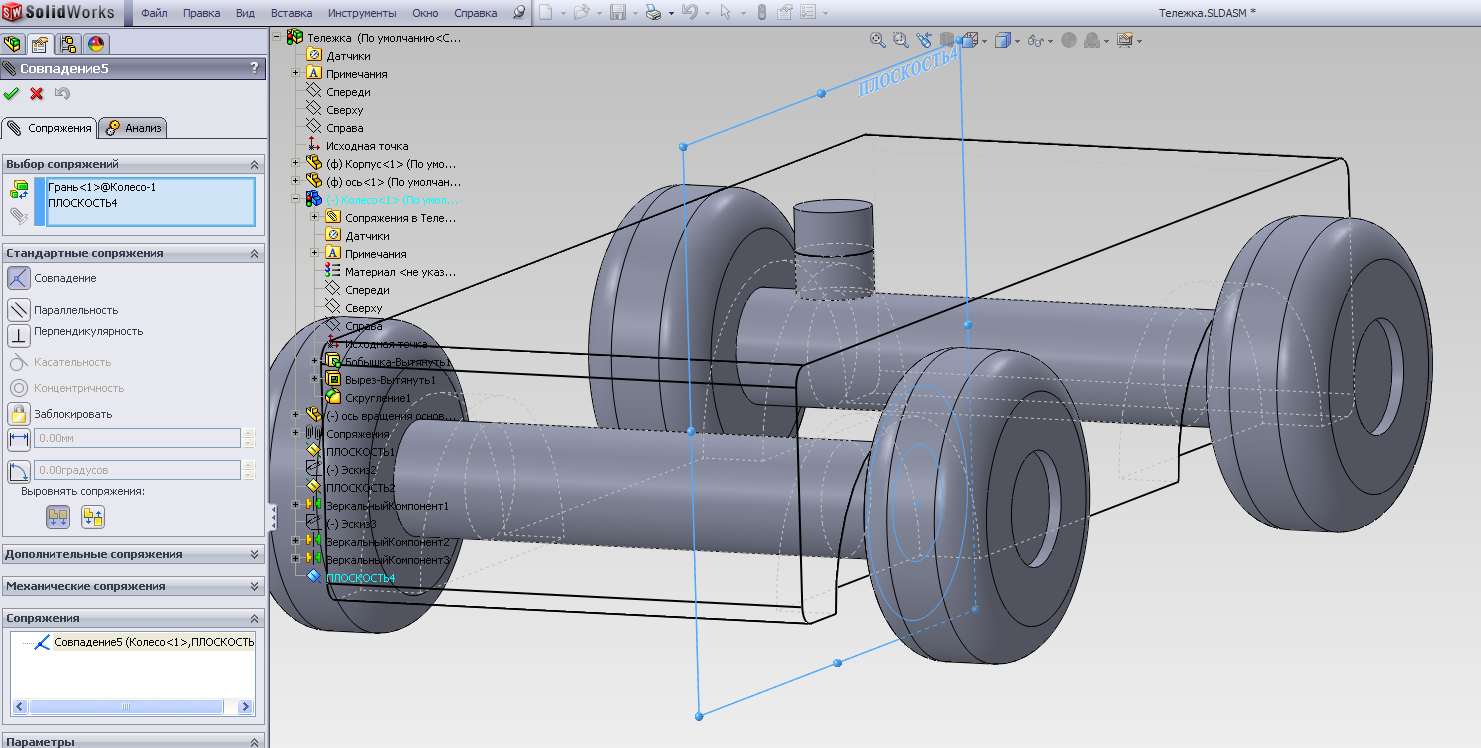
Рис.3.119
Теперь все колеса могут только вращаться, что проверяется непосредственно в самой сборке (не удается сместить центр тяжести колеса).
Итак, получили полную сборку в окончательном виде (см. рис.3.116), где все детали двигаются друг относительно друга согласно ограничениям, накладываемым исходными данными чертежей ТЗ.
Теперь можно приступать к назначению плотностей деталей сборок для последующего определения массо-инерционных характеристик изделия вцелом.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 940; Нарушение авторских прав?; Мы поможем в написании вашей работы!