КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Компоновка РТК
|
|
|
|
Компоновка РТК разрабатывается исходя из технологического процесс, а, количества основного и вспомогательного технологического оборудования, геометрических параметров, условий технического обслуживания, временных взаимосвязей составных элементов РТК, объемов производства, внешних условий (располагаемые площади) и др.
Для этом целесообразно вырезать из бумаги макеты всех материальных элементов комплекса, включая стойки систем управления, выполненные в определенном масштабе, и на миллиметровой бумаге проработать различные варианты компоновки при условии расположения приспособлений станков в зоне обслуживания робота и выбрать наилучший. Важно добиваться уменьшения расстояния между соседним оборудованием, предусмотрев удобство обслуживания. При обслуживании станков роботами, необходимо обеспечить минимальное количество точек позиционирования, что особенно важно при использовании роботов с цикловой системой управления. Анализ робота начинают с перемещений рабочего органа вблизи рабочей зоны отдельного оборудования. Прорабатывается установка и съем изделия с оборудования, условия сопряжения изделия со схватом и технологической оснасткой, вход и выход схвата из рабочей зоны оборудования. Затем оценивается перемещение робота между обслуживаемым оборудованием. Разработанная компоновка вычерчивается в масштабе с упрощенным изображением оборудования, указанием мест установки обрабатываемой детали на столе или в патроне станка, в накопителе и т.д.; обозначаются зоны обслуживания роботов и других транспортных устройств, строится траектория движения схватов роботов.
Например для мелкосерийного и серийного производства используется однопозиционный РТК (рис. 9)
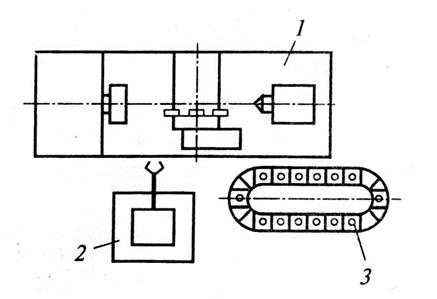
Рис. 9 Компоновка РТК
1- токарный полуавтомат; 2 – промышленный робот; 3 – тактовый стол
15. Работа РТК.
Программа работы РТК может быть представлена в виде последовательности команд управления роботом или состоять из ряда подпрограмм. Подпрограммы могут быть реализованы в любой последовательности:
· подпрограмма ожидания вызовов станка (вызывается после требуемого обслуживания каждого из станков);
· подпрограмма загрузки станков;
· подпрограмма разгрузки станков.
Подпрограмма загрузки-выгрузки согласно информации с датчиков станков, ложементов и тары, с учетом выбранного приоритета обеспечивает вызов соответствующих подпрограмм обслуживания станков. Вызов станка отсутствует во время его работы и поступает после окончания цикла обработки заготовок.
Подпрограмма загрузки станка обеспечивает последовательность выполнения следующих действий:
· перемещение ПР над ложементом станка;
· захват заготовки из ложемента или промежуточной тары;
· перемещение руки ПР в зону обработки;
· установка заготовки в патрон;
· предварительный зажим заготовки задним центром;
· зажим заготовки кулачками патрона;
· вывод руки ПР из зоны обработки. Окончание этой подпрограммы сопровождается закрытием защитных экранов станков и командой на начало обработки заготовки.
При отсутствии заготовок, подлежащих обработке на данном станке, в ложементе или в промежуточной таре блокируется переход к подпрограмме загрузки данного станка.
Подпрограмма разгрузки станка обеспечивает последовательное выполнение следующих действий:
· перемещение руки ПР в зону обработки;
· захватывание обработанной детали;
· разжим кулачков патрона и отвод заднего центра;
· вывод руки с деталью из рабочей зоны станка.
После выполнения этих операций ПР в зависимости от состояния оборудования РТК может выполнять:
· загрузку следующего по технологическому процессу станка;
· укладку заготовки в ложемент.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 1960; Нарушение авторских прав?; Мы поможем в написании вашей работы!