КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методические указания. Работа № 7. Многомерные методы оптимизации
|
|
|
|
Работа № 7. Многомерные методы оптимизации
Задание
1. Ознакомиться с методами многомерной оптимизации: методом Хука-Дживса, методом покоординатного спуска, методом наискорейшего спуска и методом градиента.
2. Составить программу расчета для одного из методов, согласно варианту задания, по двум параметрам для задачи без ограничения и отладить ее на контрольном примере.
3. Решить задачу оптимизации для целевой функции и параметров, согласно данным варианта.
1. Постановка задачи нелинейного программирования и многомерные методы приведены в разделе 3, тема 5. В данной работе многомерная оптимизация рассматривается на примере двухпараметрической задачи. В качестве методов использованы, в зависимости от варианта, метод Хука-Дживса и метод покоординатного спуска, которые относятся к методам нулевого порядка.
Алгоритм любого из методов поисковой многомерной оптимизации состоит из двух этапов:
1) Определение направления движения в пространстве параметров на текущем шаге.
2) Движение вдоль выбранного направления одним из методов одномерной оптимизации.
На первом этапе в обоих из названных методов направление выбирается вдоль координаты.
На втором – в задаче без ограничений – целесообразно использовать одномерный метод равномерного поиска, как в методе Хука-Дживса, так и в методе покоординатного спуска (см. работа №1), который рекомендуется модифицировать, введя переменный шаг (при удачном продвижении величина шага удваивается, при неудачном – делится пополам).
Процесс оптимизации завершается, когда удовлетворяется заданная точность одновременно по обеим координатам.
2. При составлении программы многомерного метода рекомендуется воспользоваться готовой программой одномерного метода равномерного поиска, использованной в работе №1. Эта программа выполняет роль внутренней процедуры и дополняется модулем чередования координат, из которого к ней производится обращение.
В качестве параметров оптимизации принимаются переменные х и у, область допустимых значений параметров определена границами (Ах,Вх и Ау,Ву),точность по каждому параметру соответственно Ех и Еу. Выражение целевой функции записывается в виде: Z(x,y)=F(x) +H(y).
Для определения координат текущей точки в области параметров оптимизации рекомендуется использовать двумерные массивы Mathcad.
Текст программы формирования целевой функции Z(x,y), а также ее геометрическая интерпретация для отладочного примера в 3D и 2D графиках приведен на рис. 36. Вызов процедур вMathCad производится согласно инструкции по работе вMathCad (см. раздел 4).
Программа двумерной оптимизации методом покоординатного спуска в MathCad и результаты оптимизационного расчета для отладочного примера приведены на рис. 37. Использованы вспомогательные машинные переменные для аргумента t и целевой функции Р(Х,Y), а также рабочие ячейки G и H. Одномерный метод равномерного поиска оформлен в виде процедуры и обозначен в программе L(P, a, e), где параметры P, a, e формальные параметры процедуры которым при обращении присваиваются фактические значения. Результаты расчетов: координаты точки минимума обозначены идентификаторами (Xm,Ym), а значение целевой функции в этой точке − Z(Xm,Ym).
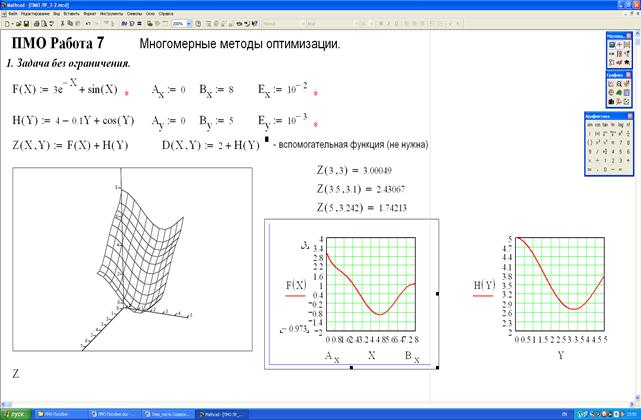
Рис.36. Программа построения целевой функции от двух параметров в Mathcad.

Рис. 37. Программа двумерной оптимизации в MathCad.
3. При выполнении оптимизации согласно варианту для целевой функции и параметров, используются данные, представленные в табл. 7. Варианты заданий, как по методу, так и по компонентам F(x) и H(y) целевой функции Z(x,y), а также интервалам по координатам х и у отражены сочетанием номеров строк табл. 7. Компоненты целевой функции F(x) и H(y), значения границ интервалов – (Ах,Вх) и (Ау,Ву), а такжезначения точностей Ех и Еу по каждой из кооринат – х и у берутся из графы «номер функции» табл.7. В качестве стартовой принимается точка С(Ах,Ау) на границе области допустимых значений параметров оптимизации (Ах,Вх и Ау,Ву).
Таблица 7. Варианты заданий.
| № варианта | ||||||||||||
| Метод | Хука-Дживса | Поокординатного спуска | ||||||||||
| Номер F(x) | ||||||||||||
| Номер H(y) | ||||||||||||
| Номер функции | Целевая функция Z(x,y) =F (x) + H(y) | Интервал (а,b) | Точность e | |||||||||
| 4 – 0,1 х + cos(x) | 0 – 5,0 | 0,1 | ||||||||||
| х ² + 1/ х | 0,1 – 2,0 | 0,01 | ||||||||||
| tg(x) + 1/ х | 0,1 – 1,5 | 0,001 | ||||||||||
| exp(x) + 1/ х | 0,1 – 1,0 | 0,01 | ||||||||||
| tg(x) – ln(x) | 0,1 – 1,0 | 0,001 | ||||||||||
| 3۰exp(– x) + sin(x) | 0 – 8,0 | 0,1 | ||||||||||
В программе двумерной оптимизации по методу Хука-Дживса используется дополнительный цикл, который обеспечивает чередование смены направлений движения к точке минимума на каждом цикле расчета.
Работа № 8. Многомерная оптимизация при ограничениях
Задание
1. Ознакомиться с методами многомерной оптимизации при ограничениях: методом движения вдоль границ, отражения от границ.
2. Составить программу расчета для одного из методов, согласно варианту задания по двум параметрам для задачи с ограничениями и отладить ее на контрольном примере.
3. Решить задачу оптимизации с ограничениями для целевой функции и параметров согласно данным варианта.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 2280; Нарушение авторских прав?; Мы поможем в написании вашей работы!