КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Уменьшение систематических погрешностей средств измерений
|
|
|
|
Различают постоянные и закономерно изменяющиеся систематические погрешности СИ.
Систематические погрешности СИ подразделяются на прогрессирующие, периодические и изменяющиеся по сложному закону.
Одной из главных составляющих систематической погрешности СИ является кинематическая погрешность, обусловленная нелинейностью функций преобразования (градуировочных характеристик) его ИП. Такие погрешности характерны для рычажных ИП.
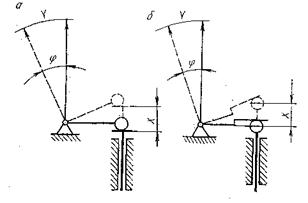
Рис. 8.3. - Рычажные измерительные преобразователи:
а — синусный; б — тангенсный
Так как отсчет Y прямолинейного перемещения штока производится по дуговой шкале, то появляется относительная кинематическая погрешность преобразователя. Погрешность можно уменьшить, если скорректировать градуировку круговой шкалы.
Малыми кинематическими погрешностями при относительно больших пределах измерения обладают двухрычажные ИП. При а = 2r кинематические погрешности двухрычажного ИП на два порядка меньше, чем у рычажного.
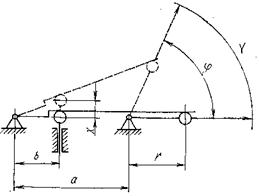
Рис. 8.4. - Двухрычажный измерительный преобразователь
Нелинейностью обладают не только механические, но и пневматические, электрические, электромагнитные и акустические ИП.
Кинематические погрешности, присущие различным ИП, не следует смешивать с технологическими кинематическими погрешностями, связанными с погрешностями их изготовления, сборки и регулировки (погрешность шага и профиля элементов передачи, эксцентриситеты элементов передач и шкал, погрешности градуировки, непрямолинейность направляющих и т. д.).
Существует два способа уменьшения технологических погрешностей:
· путем назначения более жестких допусков на отдельные элементы цепи передачи сигналов;
· посредством введения в конструкцию приборов регулировочных элементов или подвижных компенсаторов.
В общем случае в конструкции измерительного прибора должны быть предусмотрены два регулировочных узла:
· регулировка нуля;
· регулировка чувствительности.
Регулировкой нуля уменьшают влияние аддитивной погрешности, постоянной для каждой точки шкалы.
Регулировкой чувствительности уменьшают влияние мультипликативных погрешностей, изменяющихся линейно с изменением измеряемой величины.
Одновременной регулировкой нуля и чувствительности можно свести систематическую погрешность к нулю в нескольких точках шкалы и уменьшить ее максимальное значение в несколько раз.
Систематические погрешности можно уменьшить посредством:
· экранирования помех;
· компенсации погрешности;
· введения обратной связи.
8.4. Расчёт погрешностей средств измерений
Расчет результирующей погрешности средств измерений (СИ) по погрешностям их измерительных преобразователей (ИП) можно осуществить методом структурного анализа, причем эта задача может решаться применительно к отдельному прибору или к совокупности приборов определенного типа.
Применительно к отдельному прибору находят погрешности прибора на отдельных отметках шкалы, либо оценивают границы, в которых лежат погрешности данного прибора. Эти задачи приходится решать при создании уникальных средств измерений и при поэлементной проверке.
Применительно к совокупности однородных СИ необходимо чаще всего определять долю приборов, погрешность которых находится в пределах заданных границ.
В общем случае информативный параметр сигнала на выходе прибора (у) связан с информативным параметром сигнала на входе X параметрами блоков прибора ηi, помехами и другими причинами аддитивных погрешностей Zj зависимостью:

Абсолютная погрешность прибора при показании у:

где εi — относительное отклонение параметра ηi от его номинального значения ηoi:  ;
;
Vi — коэффициент влияния погрешности параметра ηi:  ;
;
Wj — коэффициент влияния аддитивной погрешности Zj:  .
.
Удобнее оценивать не абсолютную, а относительную погрешность прибора, отнесенную к конечному значению шкалы прибора:

Для решения задачи необходимо знать вид и параметры модели, а также характеристики εi и Zj.
Обычно задаются предельными значениями εi и Zj.
Тогда доверительная граница систематической погрешности приборов:
 .
.
Динамическая погрешность средства измерения определяется как разность его погрешности в динамическом режиме и статической погрешности.
Типичным случаем измерения, для которого существенна динамическая погрешность, является измерение с регистрацией сигнала, изменяющегося во времени. В этом случае абсолютная динамическая погрешность:

где В - оператор; К - коэффициент преобразования.
Оператор В зависит от формы сигнала на входе.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 689; Нарушение авторских прав?; Мы поможем в написании вашей работы!