КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип действия электрических устройств системы управления воздухозаборниками по величине приведенной частоты вращения ротора ГТД
|
|
|
|
На рис. 5 приведена схема электрогидравлической системы типа ЭСУВ, реализующей программное управление конусом и створками воздухозаборника в зависимости от величины ωпр.:
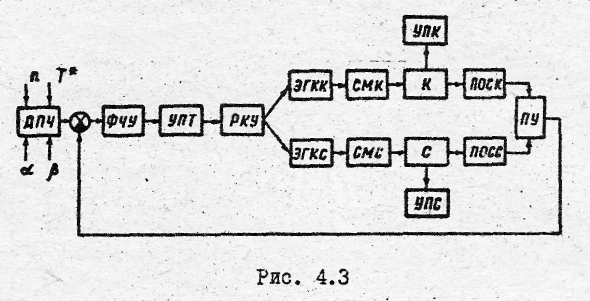
Рисунок 5. Структурная схема электрогидравлической системы типа ЭСУВ
Выходной сигнал датчика приведенной частоты вращения ДПЧ, пропорциональный ωпр, сравнивается с сигналом обратной связи, снимаемым с потенциометров обратной связи конуса (ПОСК) или створок (ПОСС).
Напряжение сигнала рассогласования поступает на вход фазо-чувствительного усилителя ФЧУ и затем - на вход усилителя постоянного тока (УПТ), на выходе которого включено релейно-коммутационное устройство (РКУ). Релейно-коммутационное устройство осуществляет включение соответствующих обмоток элекгрогидрокранов конуса (ЭГК) или створок (ЭГКС). Последние управляет подачей рабочей жидкости в полости сервомеханизмов конуса (СМК) или створок (СМС).
Со штоками сервомеханизмов соединены щетки специальных потенциометров, с которых снимаются напряжения на указатели положения конуса (УПК) и створок (УПС). Подключение в мостовую схему датчика приведенной частоты вращения соответствующих потенциометров обратной связи производится с помощью переключающего устройства (ПУ).
Датчик приведенной частоты вращения представляет собой счетно-решающее устройство, принципиальная схема которого изображена на рис. 4.
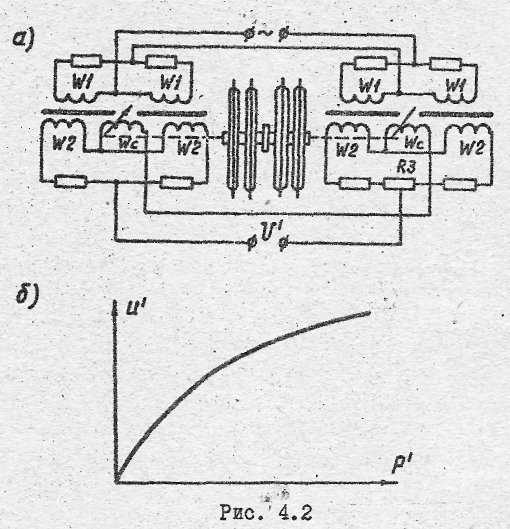
Рисунок 4. а – упрощённая схема датчика системы типа СРВМУ
В плечи моста переменного тока включены дроссель Др с индуктивностью L, проволочные термосопротивления Rт1 и Rт2, резисторы R1-R4, R7-R10 и потенциометры обратной связи R5, R6. В точки 1-2 диагонали моста подключена задающая обмотка Wз тахогенератора, от которой осуществляется питание моста. К точкам 3-4 второй диагонали моста подключена опорная обмотка Wо тахогенератора и первичная обмотка трансформатора Tpl. Тахогенератор представляет собой двухфазный генератор переменного тока с возбуждением от постоянного магнита, ротор которого через редуктор связан с валом компрессора двигателя.
Задающая Wз и опорная Wо обмотка тахогенератора смещены пространственно друг относительно друга так, что вектор напряжения  опережает по фазе вектор напряжения
опережает по фазе вектор напряжения  на угол
на угол  /2, Параметры этих обмоток выбраны таким образом, что
/2, Параметры этих обмоток выбраны таким образом, что  . Напряжение
. Напряжение  на индуктивном сопротивлении дросселя пропорционально частоте напряжения питания и, следовательно, физической частоте вращения компрессора. Напряжение
на индуктивном сопротивлении дросселя пропорционально частоте напряжения питания и, следовательно, физической частоте вращения компрессора. Напряжение  на термосопротивлении зависит от температуры заторможенного потока воздуха на входе в компрессор. Для векторов
на термосопротивлении зависит от температуры заторможенного потока воздуха на входе в компрессор. Для векторов  и
и  всегда выполняется условие
всегда выполняется условие  |
|  . Величина и фаза напряжения
. Величина и фаза напряжения  между точками 3-4 моста при фиксированном положении щетки потенциометра обратной связи зависят от соотношения напряжений
между точками 3-4 моста при фиксированном положении щетки потенциометра обратной связи зависят от соотношения напряжений  |
|  . Напряжение
. Напряжение  сравнивается с опорным напряжением
сравнивается с опорным напряжением  , а выходное напряжение моста
, а выходное напряжение моста  , равное геометрической сумме
, равное геометрической сумме  +
+  подводится к первичной обмотке трансформатора Tpl
подводится к первичной обмотке трансформатора Tpl
Пусть параметры моста и режим работы авиадвигателя таковы, что выполняется условие  =
=  . Тогда векторная диаграмма напряжений в элементах датчика будет иметь вид, представленный на рис. 6,а. Здесь угол между
. Тогда векторная диаграмма напряжений в элементах датчика будет иметь вид, представленный на рис. 6,а. Здесь угол между  и
и  равен
равен  /2, а сами векторы опираются на вектор
/2, а сами векторы опираются на вектор  , как на диаметр окружности (номера точек на диаграмме соответствуют номерам точек на рис. 6). Из диаграммы видно, что
, как на диаметр окружности (номера точек на диаграмме соответствуют номерам точек на рис. 6). Из диаграммы видно, что  =
=  +
+  =0
=0
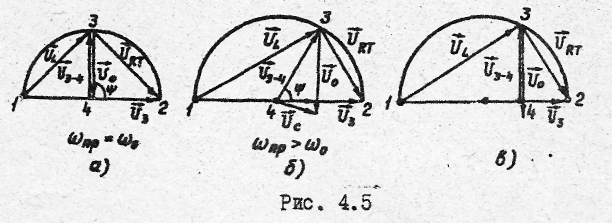
Рисунок 6. Диаграммы измерительного моста
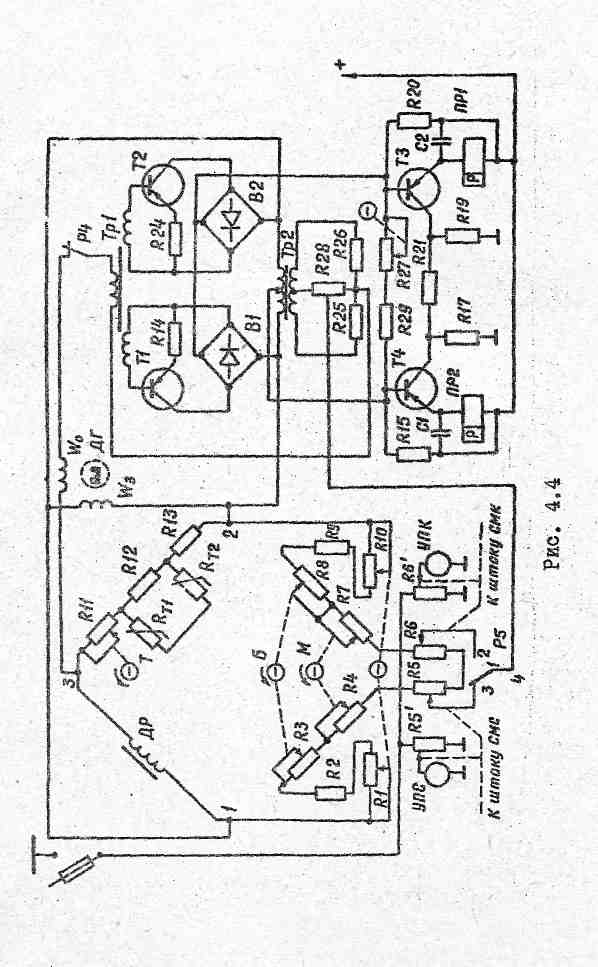
Рисунок 7. Принципиальная схема датчика приведенной частоты вращения
Увеличение частоты вращения компрессора (ωПР > ω0) приводит к возрастанию индуктивного сопротивления дросселя и, следовательно, к возрастанию напряжения  . Этот процесс отображается смещением точки 3 на векторной диаграмме (рис. 6,б) по полуокружности вправо. Аналогичное смещение точки 3 имеет место при уменьшении температуры заторможенного потока воздуха перед компрессором, когда уменьшаются величины сопротивления RТ и напряжения
. Этот процесс отображается смещением точки 3 на векторной диаграмме (рис. 6,б) по полуокружности вправо. Аналогичное смещение точки 3 имеет место при уменьшении температуры заторможенного потока воздуха перед компрессором, когда уменьшаются величины сопротивления RТ и напряжения  .Таким образом, при увеличении приведенной частоты вращения ωпр фазовый угол ψ между векторами напряжений
.Таким образом, при увеличении приведенной частоты вращения ωпр фазовый угол ψ между векторами напряжений  , и
, и  становится меньше
становится меньше  /2. В результате на выходе моста появляется напряжение
/2. В результате на выходе моста появляется напряжение  , тангенциальная составляющая которого совпадает по направлению с вектором
, тангенциальная составляющая которого совпадает по направлению с вектором  .
.
Определение фазы тангенциальной составляющей напряжения  , ее усиление и выпрямление осуществляются фазочувствительным усилителем, выполненным по двухполупериодной схеме на двух транзисторах TI и T2 (рис. 7).
, ее усиление и выпрямление осуществляются фазочувствительным усилителем, выполненным по двухполупериодной схеме на двух транзисторах TI и T2 (рис. 7).
Нагрузкой фазочувствительного усилителя являются последовательно включенные резисторы R27 и R29, напряжение URH которых подается на вход усилителя постоянного тока. Резистор R27 с изменяемым сопротивлением служит для регулирования величины зоны нечувствительности и получения устойчивого режима работы системы.
Дальнейшее усиление напряжения URH происходи с помощью усилителя постоянного тока, собранного по балансной схеме на транзисторах ТЗ и Т4 (рис. 7). Нагрузкой транзисторов являются обмотки двух высокочувствительных поляризованных реле ПР1 и ПР2. При отсутствии напряжения URH транзисторы закрыты и обмотки реле отключены.
При увеличении приведенной частоты вращения полярность напряжения URH на выходе фазочувствительного усилителя такова, что открыт транзистор ТЗ и обмотка реле ПР1 находится под напряжением. С уменьшением приведенной частоты вращения открывается транзистор Т4 и под напряжением оказывается обмотка реле ПР2. Поляризованные реле управляют включением сервомеханизмов, которые перемещают конус (створки) и щетки потенциометров R6 или R5. Таким образов, точка 4 на векторной диаграмме рис. 6 перемещается в сторону уменьшения величины сигнала  , т.е. в рассматриваемом случае вправо. Для нового равновесного состояния векторная диаграмма имеет вид, показанный на рис. 6,в. Оставшаяся составляющая напряжения
, т.е. в рассматриваемом случае вправо. Для нового равновесного состояния векторная диаграмма имеет вид, показанный на рис. 6,в. Оставшаяся составляющая напряжения  -
-  >0 перпендикулярна вектору
>0 перпендикулярна вектору  и поэтому не оказывает влияния на работу системы.
и поэтому не оказывает влияния на работу системы.
При уменьшении приведенной частоты вращения (ωПР < ω0) точка 3 на векторной диаграмме смещается по полуокружности влево и фазовый угол ψ между векторами  и
и  становится больше
становится больше  /2. В этом случае тангенциальная составляющая напряжения на выходе моста находится в противофазе с вектором .
/2. В этом случае тангенциальная составляющая напряжения на выходе моста находится в противофазе с вектором .
|
|
|
|
|
Дата добавления: 2015-01-03; Просмотров: 859; Нарушение авторских прав?; Мы поможем в написании вашей работы!