КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электрические системы ограничения частоты вращения роторов ГТД. Электрические регуляторы предельных температур газов за турбиной
|
|
|
|
Электрические системы ограничения частоты вращения роторов ГТД
Для предотвращения разрушения авиадвигателя вследствие чрезмерных механических нагрузок необходимо ограничивать частоту вращения ротора турбокомпрессора. Допустимая частота вращения ротора ГТД зависит от плотности воздуха и запаса прочности вращающихся деталей. Поэтому в качестве предельных значений частоты вращения ГТД принимают максимально допустимую физическую и максимально допустимую приведенную частоты вращения.
Максимально допустимая приведенная частота вращения nпрм турбокомпрессора ТРД зависит от величины температуры T1* заторможенного потока воздуха. Из этой зависимости и определяется предел текущих значений физической частоты вращения ГТД. На рис.3 показана схема, поясняющая способ решения указанной задачи в электрическом регуляторе типа РРД.
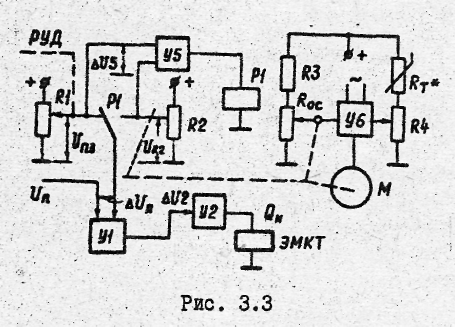
Рис. 3. Схема, электрические системы ограничения частоты вращения роторов ГТД
В одном из плеч мостиковой схемы, состоящей из резисторов и потенциометров R3, R4, Roc, включен терморезистор Rт* датчика температуры T1*. В результате угол поворота вала электродвигателя М пропорционален величине T1* (электродвигатель управляется магнитным усилителем У6, включенным в диагональ моста между щетками потенциометров R4 и обратной связью Roc). Электродвигатель перемещает щетку потенциометра R2. Следовательно, положение этой щетки определяется величиной T1*.
Потенциометр R2 профилирован так, что напряжение UR2 на его щетке при данном значении T1* определяется максимально допустимой физической частотой вращения UR2=K*nM.
На вход усилителя У5 подводится разность напряжений  Пока
Пока  , напряжение с потенциометра R1 РУД через нормально замкнутые контакты реле PI подводится к усилителю У1, где сравнивается с напряжением Un, определяемым частотой вращения n. В этом случае скважность импульсов Qи напряжения на клапане ЭМКТ определяется положением щетки потенциометра R1 РУД, т.е. частота вращения ТРД равна n3.
, напряжение с потенциометра R1 РУД через нормально замкнутые контакты реле PI подводится к усилителю У1, где сравнивается с напряжением Un, определяемым частотой вращения n. В этом случае скважность импульсов Qи напряжения на клапане ЭМКТ определяется положением щетки потенциометра R1 РУД, т.е. частота вращения ТРД равна n3.
Если РУД передвинуть в сторону увеличения n3 так, что становится  , то сработает реле PI, контакты которого переключают вход усилителя У1 со щетки R1 на щетку R2. Теперь напряжение
, то сработает реле PI, контакты которого переключают вход усилителя У1 со щетки R1 на щетку R2. Теперь напряжение  на входе усилителя У1 уже определяется разностью
на входе усилителя У1 уже определяется разностью  , т.е. происходит стабилизация максимально допустимой приведенной частоты вращения ТРД. дальнейшее перемещение РУД вперед уже не оказывает влияния на работу ТРД.
, т.е. происходит стабилизация максимально допустимой приведенной частоты вращения ТРД. дальнейшее перемещение РУД вперед уже не оказывает влияния на работу ТРД.
Независимая работа ТРД от положения РУД продолжается до тех пор, пока снова не будет выполняться условие  а это происходит или при определенном перемещении РУД в сторону уменьшения n, или при увеличении температуры T1* (тогда щетка потенциометра R2 на рис. 3.3 переместится вверх).
а это происходит или при определенном перемещении РУД в сторону уменьшения n, или при увеличении температуры T1* (тогда щетка потенциометра R2 на рис. 3.3 переместится вверх).
В тех случаях, когда разрешенная по значениям nПРМ физическая частота вращения может превышать максимально допустимую физическую частоту вращения, происходит стабилизация последней. Помимо рассмотренных электрических систем регулирования основных режимов работы ГТД широкое применение находят системы регулирования, в которых программа ступенчатого изменения параметров авиадвигателя осуществляется с помощью реле, управляющих электромагнитными клапанами подачи топлива, открытия лент перепуска, изменения положения створок реактивного сопла и другими конструктивными элементами системы регулирования основных и форсажных режимов.
Вывод: для предотвращения разрушения авиадвигателя вследствие чрезмерных механических нагрузок необходимо ограничивать частоту вращения ротора турбокомпрессора. Допустимая частота вращения ротора ГТД зависит от плотности воздуха и запаса прочности вращающихся деталей. Поэтому в качестве предельных значений частоты вращения ГТД принимают максимально допустимую физическую и максимально допустимую приведенную частоты вращения.
Электрические регуляторы предельных температур газов за турбиной
Для предотвращения выхода температуры газов авиадвигателя за предельно допустимые значения на современных летательных аппаратах применяются электрические системы ограничения температуры газов ГГД. Функциональная схема такой системы типа РТ представлена на рис.4,а.
Термо-э.д.с. с 11 или 13 хромель-алюмелевых термопар ВТ соединенных параллельно, поступает на вход регулятора и сравнивается с опорным напряжением еОП задатчика ЗТ.
Если температура газов авиадвигателя отличается от величины, определяемой настройкой задатчика, то разность опорного напряжения и термо-э.д.с.  подается на управляющую обмотку магнитного усилителя МУ, выполненного по дифференциальной схеме. Магнитный усилитель усиливает разностный сигнал Δe и преобразует его в сигнал переменного тока с частотой 2000 Гц. Усиленное напряжение, фаза которого зависит от полярности разностного сигнала, подается на вход полупроводникового фазочувствительного усилителя - детектора ФЧУ. Применение МУ и ФЧУ обеспечивает усиление слабых сигналов постоянного тока с достаточно высокой стабильностью коэффициента усиления на переменном токе.
подается на управляющую обмотку магнитного усилителя МУ, выполненного по дифференциальной схеме. Магнитный усилитель усиливает разностный сигнал Δe и преобразует его в сигнал переменного тока с частотой 2000 Гц. Усиленное напряжение, фаза которого зависит от полярности разностного сигнала, подается на вход полупроводникового фазочувствительного усилителя - детектора ФЧУ. Применение МУ и ФЧУ обеспечивает усиление слабых сигналов постоянного тока с достаточно высокой стабильностью коэффициента усиления на переменном токе.
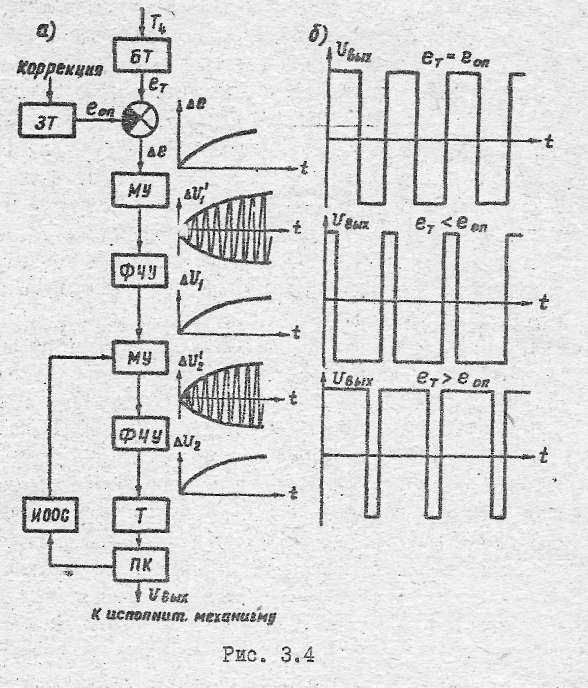
Рис. 4. Схема электрического регулятора предельных температур газов за турбиной: а – функциональная схема системы типа РТ; б – скважность импульсов на ИМ
Усиленное и выпрямленное напряжение ΔU 1 подается на второй каскад усиления, состоящий также из МУ и ФЧУ. С выхода ФЧУ второго каскада напряжение ΔU 2 подается на полупроводниковый симметричный триггер Т с одним устойчивым состоянием. Триггер управляет усилителем постоянного тока УПТ и полупроводниковым ключом ПК. Сигналы с УПТ ПК поступают в обмотки поляризованной магнитной системы исполнительного электромеханизма ИМ. С выходов Т и ПК на вход МУ второго каскада усиления подается сигнал инерционной отрицательной обратной связи ИООС, с помощью которой осуществляется широтно-импульсная модуляция напряжения, подаваемого на ИМ. Скважность импульсов на ИМ определяется величиной и знаком отклонения температура газов от настройки задатчика (рис.4,б). ИМ воздействует на элементы системы регулирования подачи топлива в авиадвигатель, предотвращая перегрев авиадвигателя. Для повышения точности работы при различных условиях полета в регуляторах температуры осуществляются коррекций задатчика либо по температуре газов на входе в компрессор, либо по частоте вращения ротора ГТД, либо по высоте полета и т.п.
Для предотвращения возможности выхода из строя авиадвигателя при отказах регулятора температуры в последнем осуществляется встроенный, контроль работоспособности с выдачей сигнала об отказе на световое табло экипажу и на отключение регулятора температуры от системы регулирования подачей топлива.
Система встроенного контроля осуществляет контроль работоспособности усилительно-преобразовательного тракта регулятора по величине скважности импульсов на ИМ. При скважности импульсов 0,8-0,9 для сигналов Δe обеих полярностей включается система защиты, которая при достижении скважности значения 1,0 выдает аварийный сигнал.
Принцип контроля исправности цепи батареи термопар поясняется схемой на рис.5. К батарее термопар ТП подключается через высокоомный резистор Rк напряжение Uк переменного тока. С учетом малого сопротивления термопар все напряжение Uк падает на Rк и в обмотку управления Wу магнитного усилителя МУ первого каскада регулятора сигнал переменного тока не поступает.
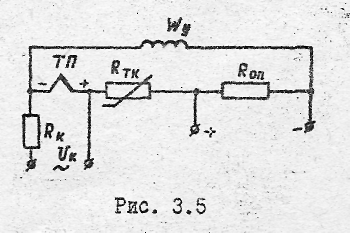
Рис. 5. Схема контроля исправности цепи батареи термопар
Терморезистор Rтк служит для компенсации термо-э.д.с. "холодного спая" термопар, а на резисторе Rоп формируется напряжение eОП, задающее ограничиваемую температуру. Таким образом, при исправной цепи термопар в обмотку Wу поступает лишь сигнал Δe постоянного тока.
При обрыве цепи батареи термопар напряжение Uк обеспечивает протекание через Wу переменного тока, который приводит к появлению в одной из обмоток МУ первого каскада (на схеме не показано) сигнала переменного тока. Этот сигнал после выпрямления поступает на одну из обмоток управления МУ второго каскада и запирает его, обеспечивая скважность 1,0 и срабатывание системы контроля работоспособности регулятора температуры с его последующим отключением.
Вывод: для предотвращения выхода температуры газов авиадвигателя за предельно допустимые значения на современных летательных аппаратах применяются электрические системы ограничения температуры газов ГГД.
(ГЗ№23 вопросы 2,3)
|
|
|
|
|
Дата добавления: 2015-01-03; Просмотров: 918; Нарушение авторских прав?; Мы поможем в написании вашей работы!