КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системы координат. ЛА как объект управления. Законы управления
|
|
|
|
При решении вопросов управления и стабилизации угловых положений ЛА и решении этих задач автопилотом используется связная система координат, которая удобнее всего использовать для уравнений движения ЛА при работе автопилота.
Самолёт и автопилот представляют собой единую замкнутую систему автоматического регулирования и управления.
Статические и динамические свойства самолёта и системы самолёт – автопилот в целом полностью характеризуются передаточными функциями. Для получения передаточных функций используются уравнения движения самолёта, хорошо известные из курсов динамика полёта самолётов и автоматики. Для упрощения анализа эти уравнения линеаризуют относительно некоторого установившегося режима полёта и получают линейные дифференциальные уравнения в отклонениях переменных от их исходных значений. Для дальнейшего упрощения продольное и боковое движения самолёта считается изолированным.
Продольное движение. Если за установившийся режим принять горизонтальный полёт, то высоты полёта и плотность воздуха будут постоянны.
При рассмотрении угловых движений самолёта можно считать постоянной и скорость полёта, так как она изменяется значительно медленнее угловых координат продольного движения. Примем также, что руль высоты воздействует только на величину продольного момента и тяга двигателя не меняется. С учётом этих допущений продольное движение самолёта описывается следующей системой линейных дифференциальных уравнений:


где, υ, α, δВ – отклонения углов тангажа, атаки и руля высоты (управляемого стабилизатора) от значений, соответствующих установившемуся режиму полёта;
f1 и f2 – возмущения, действующие на самолёт;
a11, а12, а13, а14, а21 – коэффициенты, зависящие от аэродинамических сил и моментов, их частных производных, веса самолёта и т.д.;
D = d / dt - оператор дифференцирования.
После решения предыдущего уравнения относительно υ передаточные функции самолёта относительно управляющего δВ и возмущающих f1 и f2 воздействий будут иметь вид:
где, с1 = а11 + а12 + а21; с2 = а13 + а11 + а21.
Из системы уравнений следует, что самолёт по отношению к углу тангажа можно представить как последовательное соединение колебательного, форсирующего и интегрирующего звеньев.
Боковое движение. Боковое движение самолёта складывается из двух взаимосвязанных движений: движения рыскания (относительно нормальной оси) и движения крена (вокруг продольной оси). Но поскольку эти движения затухают быстро (за время, в течение которого направление вектора скорости практически не меняется), то можно считать угол рыскания ψ равным углу скольжения и рассматривать раздельно движение рыскания и движение крена. Тогда для установившегося режима при υ = 0, пренебрегая спиральными моментами самолёта, можно записать упрощённые линеаризованные уравнения бокового движения самолёта в виде:


где,ψ, γ, δН, δЭ - отклонения углов рыскания (курса), крена, руля направления и элеронов от значений, соответствующих установившемуся полёту;
f1 и f2 - возмущения, действующие на самолёт;
b11, b12, b13, b21, b22, b23 – коэффициенты, зависящие от частных производных, веса самолёта и т.п.
Из системы уравнений следует, что первое уравнение не зависит от второго и определяет движение рыскания. Передаточная функция по углу рыскания относительно управляющего воздействия δН соответствует колебательному звену:

Из предыдущей системы уравнений получается также передаточная функция самолёта по углу крена относительно управляющего воздействия элеронов δЭ:
В знаменателе передаточной функции отсутствует свободный член. Это говорит о том, что в боковом движении по отношению к величинам угла крена самолёт является нейтральным.
Входными сигналами, из которых формируется сигнал управления автопилотом, могут быть отклонения от заданных значений углов курса φ, крена γ, тангажа υ, высоты полёта h, величины соответствующих угловых скоростей и ускорений, а также интегралы от этих сигналов. Уравнение, определяющее зависимость величины или скорости перемещения исполнительного механизма самолёта от значений управляющих сигналов, называется законом управления автопилотом. В соответствие с видом закона управления существуют автопилоты статические и астатические.
Для каждого канала управления автопилота может быть выбран свой закон управления.
Статические автопилоты. В статических автопилотах могут использоваться следующие законы управления:
- для канала руля направления:

- для канала элеронов:

- для канала руля высоты:

где, ТН, ТЭ, ТВ – постоянные времени автопилота для каналов курсом, креном, высотой (для идеального автопилота ТН = ТЭ = ТВ = 0;
 - соответствующие коэффициенты усилении (передаточные числа).
- соответствующие коэффициенты усилении (передаточные числа).
Рассмотрим принцип работы статического автопилота на примере работы канала тангажа. Когда самолёт летит горизонтально (рис. 1а), то руль высоты РВ, щётки потенциометров ПД датчика и потенциометр обратной связи (ПОС) находятся в нейтральном положении 1 и 1*. Разность напряжений на щётках, подводимая к усилителю У, равна нулю (потенциометры ПД и ПОС образуют мостиковую схему, в диагональ которой включена вторичная обмотка W питающего трансформатора).
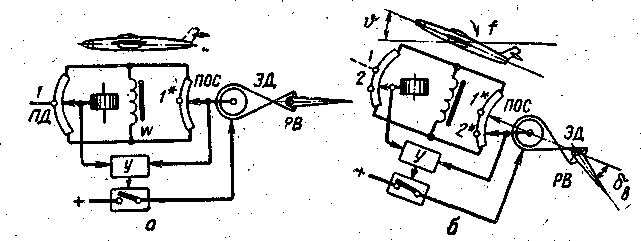
Рис 1. Схема для пояснения принцип работы статического автопилота
Пусть какой - то внешний момент f воздействует на самолёт так. Что угол тангажа становиться равным υ (рис.1, б). Вместе с самолётом разворачиваются потенциометры ПД и ПОС. Щётка потенциометра ПД закреплена на гировертикали и не изменяет положения в пространстве, а потенциометр ПД смещается относительно этой щётки. Вследствие смещения щётки с точки 1 электрической нейтрали в точку 2 мостик становится неуравновешенным. Выходное напряжение мостика усиливается усилителем У и подаётся на электродвигатель ЭД рулевой машины. Последний отклоняет руль высоты РВ вниз. Одновременно смещается щётка ПОС потенциометра обратной связи, закреплённая на выходном валу рулевой машины; следовательно, напряжение на входе усилителя уменьшается. Руль будет перемещаться вниз до тех пор, пока щётка ПОС не дойдёт до точки 2* потенциометра, имеющей такой же потенциал, как и точка 2 на потенциометре ПД. При этом руль отклониться на угол δВ, величина которого благодаря наличию жёсткой обратной связи оказывается пропорциональной углу υ отклонения самолёта от исходного положения. Самолёт начинает возвращаться к горизонтальному положению, вследствие чего щётка потенциометра ПД двигается обратно к положению нейтрали (в точку 1). Теперь между щётками ПД и ПОС появляется напряжение противоположной фазы и рулевая машина начинает возвращать руль к нейтральному положению. Если внешний возмущающий момент f становиться равным нулю, то к моменту установления самолёта в линию горизонтального полёта одновременно руль и щётки потенциометров устанавливаются в нейтральное положение. Работа двух других каналов автопилота происходит так же, как и работа канала тангажа.
Как следует из уравнений движений и рассмотрения принципа работы, для статических автопилотов в установившемся режиме (Dφ =Dθ =0) угол отклонения руля пропорционален отклонению угловой координаты самолёта (ψ, γ или υ). Поэтому если на самолёт воздействует постоянный возмущающий момент f относительно какой-либо оси, то руль скомпенсирует этот момент только при наличии вполне определённого отклонения соответствующей угловой координаты самолёта от заданного значения. Таким образом, статический автопилот благодаря наличию жёсткой отрицательной обратной связи обеспечивает стабилизацию угловых положений самолёта со статическими ошибками, если имеется внешний возмущающий момент. Статическая ошибка ликвидируется только после того, как исчезнет возмущающий момент.
В уравнениях регулирования автопилота имеются слагаемые, которые соответствуют сигналам от произвольных отклонений угловых координат, т.е. сигналам, пропорциональным угловой скорости изменения угловой координаты самолёта. Это улучшает качество переходных процессов системы регулирования. Производные в уравнении регулирования эквивалентны увеличению демпфирования самолёта.
В канал руля направления вводится сигнал, пропорциональный углу крена. Это объясняется необходимостью противодействовать развороту самолёта, тенденция к которому появляется при возникновении крена. По аналогичным причинам в канал элеронов вводится сигнал, пропорциональный изменению угла φ курса, а в канал руля высоты - сигнал, пропорциональный абсолютной величине угла крена γ.
Вывод: законы управления взаимодействуют с аэродинамическими характеристиками летательного аппарата в результате чего лётные характеристики претерпевают улучшение и обеспечивают хорошую управляемость и безопасность пилотирования.
|
|
|
|
|
Дата добавления: 2015-01-03; Просмотров: 1489; Нарушение авторских прав?; Мы поможем в написании вашей работы!