КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип построения автопилотов и законы управления ими
|
|
|
|
Устройства для автоматического выполнения отдельных операций по управлению полетом появились по существу вместе с самолетом. По мере развития самолетостроения, роста скоростей, высот и дальностей полета росли и развивались средства автоматического управления режимами полета.
Любой режим полета характеризуется рядом параметров: высотой, скоростью, углами крена, тангажа, отклонения от заданного направления полета (угол рыскания), атаки, скольжения, наклона траектории, линейными отклонениями от траектории и т. д. Названные параметры можно разделить на две группы:
1) характеризующие угловые движения самолета относительно его центра масс;
2) определяющие движения самого центра масс самолета. Следовательно, и управление полетом складывается из управления движением самолета вокруг центра масс и управления движением центра масс.
Под автопилотом понимают устройство, осуществляющее автоматическое управление тем или иным движением летательного аппарата.
Под понятием «управление» следует различать стабилизацию заданного значения того или иного параметра режима полета (режим стабилизации) и изменение этого параметра по заданному закону или произвольно (режим управления).
В настоящее время широкое применение нашли автопилоты, осуществляющие управление в основном угловыми движениями. В режиме стабилизации они поддерживают заданные значения углов крена, тангажа, рыскания заданную высоту полета и курс.
В режиме управления автопилот позволяет осуществлять координированный разворот, набор высоты или снижение, приведение самолета к горизонту и т. д.
Следует отметить, что стабилизация угловых положений самолета не обеспечивает стабилизации траектории его движения, так как изменение траектории полета может произойти и без изменения углов, на которые реагирует автопилот.
Так же как летчик при ручном управлении, автопилот воздействует на рули самолета. Руль высоты вызывает появление момента МZ и вращение самолета относительно поперечной оси 2. Элероны вызывают поперечный крен, т. е. появление момента Мх и поворот самолета относительно продольной оси X, а при крене самолет обязательно будет совершать вращение вокруг вертикальной оси У. Руль направления создает момент Му и вызывает вращение самолета относительно вертикальной оси У, а разворачивающийся самолет имеет тенденцию к крену и вращению относительно оси X.
В качестве датчиков сигналов стабилизации угловых положений самолета применяются трехстепенные гироскопы (ДПС — датчики позиционных сигналов), позволяющие измерять углы отклонения самолета от заданного направления, скоростные и ускорительно-скоростные гироскопы (ДДС — датчик демпфирующих сигналов), измеряющие скорости и ускорения изменения этих углов.
Структура сигналов управления (закон управления) и их порции (передаточные числа) выбираются таким образом, чтобы обеспечить максимальную точность управления при сохранении устойчивости системы.
Задатчики сигналов управления (ЗСУ) разделяются на задатчики по положению (когда положению задатчика соответствует угол наклона самолета) и задатчики по скорости (когда, положению задатчика соответствует скорость вращения самолета).
Вывод: широкое применение на новых самолетах получили демпферы и автоматы устойчивости, которые повышают собственную устойчивость самолета. Эти устройства работают и при ручном управлении самолетом, осуществляя демпфирование колебаний посредством отклонения руля по сигналам угловой скорости самолета. Центральное место в оборудовании современных самолетов стали занимать комплексные системы автоматического управления полетом, которые объединяют автоматизацию функций пилотирования и навигации.
80. Автопилот АП – 28А
Автопилот обеспечивает:
- стабилизацию самолета относительно осей X У и Z;
- осуществление координированных разворотов;
- подъем или спуск самолета от ручек управления;
- автоматическое приведение самолета к горизонтальному полету;
- выдерживание заданной высоты полета.
На рис. 2 изображена упрощенная блок-схема автопилота АП-28.
Регулирование в режиме стабилизации осуществляется по сигналам угла и угловой скорости в каждом канале. В канале крена, кроме того, вводится из канала курса сигнал перекрестной связи по углу. Сигналы, пропорциональные углам отклонения по крену и тангажу, снимаются с потенциометрических датчиков центральной гировертикали ЦГВ-2 или ЦГВ-8. Эти гировертикали по принципу действия и конструкции основных узлов не имеют принципиальных отличий от применяемой в АП-6Е гировертикали ЦГВ-4.
Сигнал угла в канал курса поступает с ГИК-1 или от курсовой системы. Выдерживание заданной высоты полета осуществляется по сигналам высотного корректора, которые после усиления электронным усилителем поступают в сумматор канала тангажа автопилота.
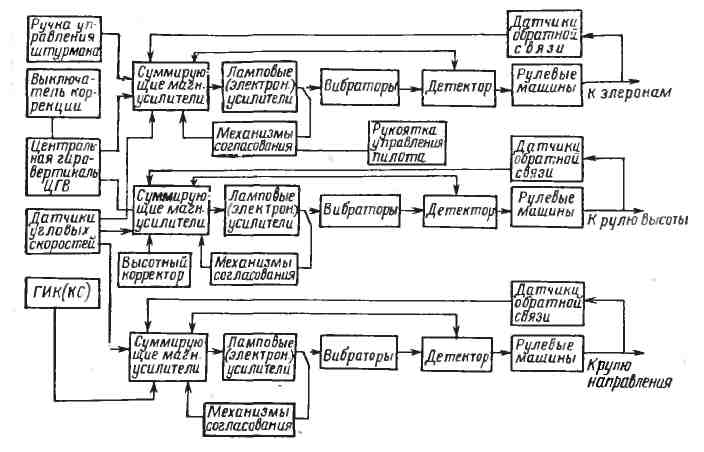
Рис. 2. Упрощённая блок-схема автопилота АП-28
Сигналы, пропорциональные угловым скоростям самолета, снимаются с индукционных датчиков скоростных гироскопов. Перед введением сигналов в сумматоры каналов они преобразуются в напряжения постоянного тока фазочувствительными выпрямителями.
Суммирование сигналов производится в суммирующих магнитных усилителях. Там сигналы управления преобразуются в напряжения переменного тока и подаются на электронные усилители. В каждом канале сервопривода имеется вибратор, генерирующий колебания, которые накладываются на полезный сигнал. Это способствует повышению чувствительности привода. Иглу гидравлической рулевой машины приводит в движение пропорциональное реле. В приводе, кроме обратной связи 4, 5, 6, охватывающей сервомотор, имеется местная отрицательная обратная связь, охватывающая только усилители 7 и 16, 8 и 17, 9 «18. Она предназначена для улучшения динамических характеристик сервопривода автопилота.
Включение питания автопилота производится выключателем «Питание», расположенным на пульте управления (рис. 3.). Напряжение подается на гиромоторы и усилители каналов. Имеющиеся в каналах рассогласования приводят в действие следящие системы (механизмы согласования), которые компенсируют входные сигналы. Кроме того, готовность автопилота определяется временем прогрева ламп и разгона гироскопов. Для этого предусмотрена задержка времени, которая осуществляется с помощью биметаллического реле.
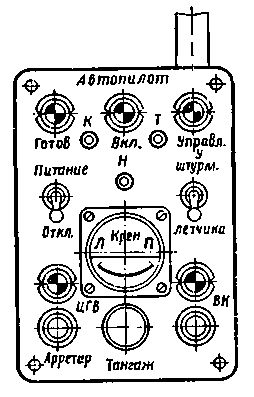
Рис. 3. Лицевая сторона пульта управления автопилота АП – 28
О состоянии готовности автопилота и включении свидетельствует загорание лампочки «Готов» и «ЦГВ» на пульте управления. Причем лампочка «ЦГВ» загорится только в том случае, если отсутствует сигнал о выбивании ЦГВ и углы крена и тангажа самолета не превышают 60° (или 30° — в зависимости от типа самолета).
Для включения автопилота достаточно нажать кнопку «Вкл.», расположенную на рукоятке управления пилота, входящую в комплект автопилота. Управление самолетом от рукоятки пилота через автопилот здесь осуществляется по скорости, т. е. положению рукоятки соответствует определенная скорость вращения самолета. Сигналы в сервоприводы от рукоятки пилота поступают через механизмы согласования. Управление от ручки штурмана осуществляется по положению.
При передаче управления самолетом штурману необходимо переключатель на пульте управления поставить в положение «Управление у штурмана».
С пульта управления автопилотом можно заарретировать ЦГВ, для чего надо нажать кнопку «Арретир».
Указатель на пульте управления служит для контроля за положением рам гироузла. При необходимости можно произвести автоматическое выравнивание самолета по крену и тангажу из любого отклоненного положения в пределах допустимых углов. Для этого надо нажать кнопку «Приведение к горизонту», которая устанавливается в наиболее удобном для пилота месте. Для быстрого отключения автопилота на штурвалах самолета устанавливаются кнопки аварийного отключения.
Вывод: на ряде типов самолетов устанавливается автопилот АП-28. Он выпускается в двух вариантах: электрический (с электрическими рулевыми машинами — ЛП-28Л1) и электрогидравлический (с гидравлическими рулевыми машинами — АП-28, В1, Д1). АП-28 является автопилотом с жесткой обратной связью (в некоторых модификациях можно встретить изодромную обратную связь).
|
|
|
|
|
Дата добавления: 2015-01-03; Просмотров: 2743; Нарушение авторских прав?; Мы поможем в написании вашей работы!