КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Определения САУ, регулируемые параметры, управляющие воздействия и внешние возмущения
Автопилотом принято называть бортовую автоматическую систему, предназначенную для решения задач стабилизации углового положения и барометрической высоты полета летательного аппарата. Самолетные автопилоты, кроме того, обеспечивают приведение самолета к горизонтальному полету практически из любого пространственного положения.
Принцип работы этой системы можно рассмотреть на примере канала управления рулями высоты, функциональная схема которого дана ниже (Рис. 2).
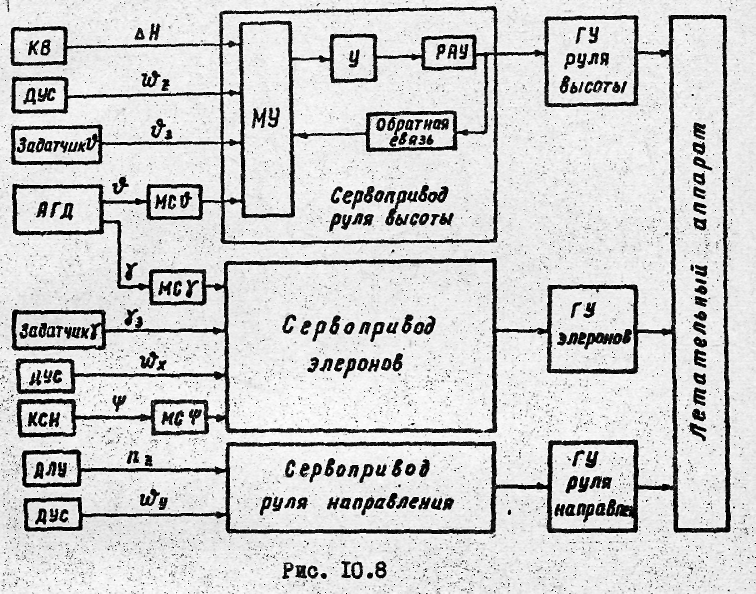
Рис. 2. Функциональная схема канала управления рулями высоты
Измерительные устройства измеряют значения отклонений угла тангажа и угловой скорости по тангажу, преобразуют эти отклонения в величины напряжений. После алгебраического суммирования в суммирующем устройстве сумма напряжений усиливается усилителем и подаётся на рулевую машинку РМ автопилота. Последняя отклоняет руль высоты самолёта, в результате чего появившееся отклонение угла тангажа ликвидируется.
В автопилотах с обратной связью на суммирующее устройство с выхода рулевой машины подаётся сигнал обратной связи, величина которого пропорционально углу или угловой скорости отклонения руля высоты. Благодаря наличию обратной связи углов или угловая скорость отклонения руля высоты пропорциональны величине входного сигнала. Отрицательная обратная связь обеспечивает устойчивость и быстрое затухание колебаний системы самолёт – автопилот. При отсутствии сигнала отрицательной обратной связи отклонение руля высоты нарастает до тех пор, пока есть отклонение самолёта от заданного положения. Поэтому при возвращении самолёта в заданное положение руль будет отклонён на максимальный угол, что вызовет переход самолёта через заданное положение и колебания его относительно этого положения. Сигнал отрицательной обратной связи уменьшает величину сигнала управления и при подходе самолёта к равновесному положению руль также приходит в заданное положение. Самолёт не будет совершать колебаний около заданного значения угла тангажа. Для задания определённого значения угла тангажа в схеме автопилота предусматривается специальный задатчик этой величины.
Аналогичные функциональные схемы имеют каналы управления креном и курсом самолёта.
Для изучения статических и динамических свойств системы самолёт автопилот и правильного выбора параметров автопилота необходимо получить передаточные функции составляющих систему частей – самолёта и автопилота.
В зависимости от создаваемых управляющих моментов автопилоты могут быть выполнены по одно-, двух-, трех- или четырехканальной схеме. Современные самолетные автопилоты в большинстве выполняются по трехканальной схеме, а вертолетные - по четырехканальной схеме.
В состав каждого канала автопилота входят следующие основные элементы: датчики информации, задатчики стабилизируемых значений угловых координат, механизмы согласования, суммирующие устройства, усилители, исполнительные устройства, элементы обратной связи.
На схеме не показаны устройства переключения режимов работы, сигнализации, контроля и обеспечения безопасности, а также корректирующие устройства (фильтры), улучшающие динамические свойства контуров стабилизации.
Датчики информации. Информация о пространственном положении летательного аппарата формируется датчиками, входящими в состав автопилота, а также различными самолетными датчиками и системами.
Датчиками углов крена γ и тангажа υ обычно являются центральные гировертикали (ЦГВ) или гиродатчики авиагоризонтов АГД-1, а углов курса ψ - гирополукомпасы (ГПК) или гироагрегаты курсовых систем (КС).
Угловые скорости вращения самолета  вокруг связанных осей измеряются с помощью соответствующих датчиков угловых скоростей (ДУС).
вокруг связанных осей измеряются с помощью соответствующих датчиков угловых скоростей (ДУС).
Сигналы об угловых ускорениях самолета  получаются дифференцированием сигналов угловых скоростей, снимаемых с ДУС, или путем измерения скорости поворота измерительной оси ДУС специальным тахогенератором, установленным на этой оси.
получаются дифференцированием сигналов угловых скоростей, снимаемых с ДУС, или путем измерения скорости поворота измерительной оси ДУС специальным тахогенератором, установленным на этой оси.
Отклонения барометрической высоты Н от заданного значения Нз измеряются корректорами высоты КВ.
Корректор высоты представляет собой барометрический высотомер с устройством формирования сигнала отклонения барометрической высота от заданного значения  .
.
С изменением высоты полета жесткий центр анероидных коробок 1 через передаточный механизм 2 поворачивает якорь индуктивного датчика 3. При повороте якоря относительно статора индуктивного датчика 4, установленного на зубчатом колесе 5, возникает сигнал рассогласования, который после усиления подается на двигатель 9 следящей системы. Двигатель через редуктор (шестерни 5 и 10) перемещает статор вслед за ротором и одновременно через электромагнитную муфту 6 поворачивает щетку 7 потенциометра 8. Срабатывание электромагнитной муфты происходит при включении стабилизации высоты. При этом с потенциометра 8 снимается сигнал, пропорциональный отклонению самолета от заданной высоты.
Линейные перегрузки измеряются с помощью акселерометров или датчиков линейных ускорений (ДЛУ) вдоль соответствующих осей самолета.
Задатчики стабилизируемых параметров выполняются в виде небольших по размеру строевых рукояток управления либо в виде ручек потенциометров. Роль задатчиков могут выполнять также единые ручки управления самолетом.
В автопилотах используются задающие устройства, осуществляющие управление по положению, по скорости, по скорости и положению.
Вывод: автопилотом принято называть бортовую автоматическую систему, предназначенную для решения задач стабилизации углового положения и барометрической высоты полета летательного аппарата. Самолетные автопилоты, кроме того, обеспечивают приведение самолета к горизонтальному полету практически из любого пространственного положения.
|
|
Дата добавления: 2015-01-03; Просмотров: 897; Нарушение авторских прав?; Мы поможем в написании вашей работы!