КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Алмасу реакциясы 5 страница
|
|
|
|
 .(17.6)
.(17.6)
Максвелл үлгісінің жалпы деформациясы мен деформация жылдамдығы
 ; (17.7)
; (17.7)
 .(17.8)
.(17.8)
өрнектері арқылы есептеледі.
 және
және  жағдайында
жағдайында
 (17.9)
(17.9)
теңдеуін аламыз. Мұндағы  - кернеудің релаксация уақыты.
- кернеудің релаксация уақыты.
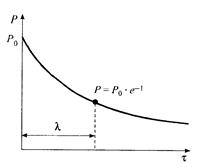
λ шамасы тұрақты деформацияда P0 бастапқы кернеу e есе кемитін уақытқа тең. λ шамасы неғұрлым үлкен болса, кернеу релаксациясының жылдамдығы да соғұрлым үлкен болады (65-сурет).
 Теңдеуге сәйкес серпім-ді-тұтқыр денелердің реоло-гиялық тәртібі τ жүктеме уа-қыты мен λ релаксация уақы-тының қатынасына тәуелді. Егер τ -ға қарағанда λ аз болса, жүйенің тәртібі сұйықтыққа сәйкес және ағу барысында Р азаяды. Кернеудің толық ре-лаксациясы τ →∞ шартында орындалады. λ>>τ болғанда жүйенің қасиеттері қатты серпімді денегі сәйкес келеді. Бұл жағдайда кернеудің релаксациясы жүріп үлгермейді де бастапқы кернеу Р0 барлық τ уақытында сақталады.
Теңдеуге сәйкес серпім-ді-тұтқыр денелердің реоло-гиялық тәртібі τ жүктеме уа-қыты мен λ релаксация уақы-тының қатынасына тәуелді. Егер τ -ға қарағанда λ аз болса, жүйенің тәртібі сұйықтыққа сәйкес және ағу барысында Р азаяды. Кернеудің толық ре-лаксациясы τ →∞ шартында орындалады. λ>>τ болғанда жүйенің қасиеттері қатты серпімді денегі сәйкес келеді. Бұл жағдайда кернеудің релаксациясы жүріп үлгермейді де бастапқы кернеу Р0 барлық τ уақытында сақталады.
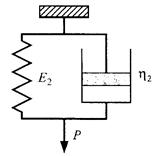
Гук пен Ньютон элементтерін параллель жалғастырсақ, Кельвин-Фойгт үлгісін аламыз (66-сурет). Ол эластикалығы бар тұтқыр-серпімді денелердің тәртібін бейнелейді. Бұл үлгіде серпімді деформациялар лезде емес, Ньютон элементінің деформациясына жеткілікті уақыттан кейін пайда болады. Кельвин-Фойгт үлгісінде элементтердің деформациялары бір-дей, ал ығысу кернеулері қосылады:
Р = РГ + РН,
мұндағы РГ және РН – серпімді және тұтқыр элементтеріне сәйкесінше ығысу кернеулері.
|
|
Р = Р0 тұрақты кернеу берілгенде Кельвин-Фойгт үлгісінің деформациясы уақытқа қарай біркелкі өседі (67-сурет). Бұл жағдайдағы деформация жылдамдығы
 (17.10)
(17.10)
өрнектерімен анықталады.
Тұрақты Р0 жүктеменің әсерінен Ньютон элементіндегі поршені қозғалып, уақытқа қарай оның жылдамдығы азаяды, себебі серпімді элементке жүктеменің көп үлесі келеді. Деформация жылдамдығы нольге тең болғанда, деформация пружинаның серпімділік модулімен анықталатын өзінің макси-мал мәніне жетеді. Тұтқыр-серпімді денелердің деформация-сының уақытқа туелділігін бейнелеу үшін (17.10)-теңдеуді интергралдаймыз. Жүктеме тұрақты деп
 (17.11)
(17.11)
өрнегін аламыз.  параметрін деформацияның кешігу немесе релаксация уақыты деп атайды. Оның шамасы дененің эластикалығын көрсетіп, неғұрлым үлкен болса, соғұрлым дене эластикалық болады. Тұтқыр-серпімді денелердің эластика-лығын сипаттау үшін тағы бір шаманы – эластикалық деформацияның модулін (Е2) қолданып, берілген жүктемеге сәйкес максимал деформация арқылы есептейді:
параметрін деформацияның кешігу немесе релаксация уақыты деп атайды. Оның шамасы дененің эластикалығын көрсетіп, неғұрлым үлкен болса, соғұрлым дене эластикалық болады. Тұтқыр-серпімді денелердің эластика-лығын сипаттау үшін тағы бір шаманы – эластикалық деформацияның модулін (Е2) қолданып, берілген жүктемеге сәйкес максимал деформация арқылы есептейді:
 . (17.12)
. (17.12)
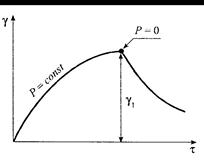
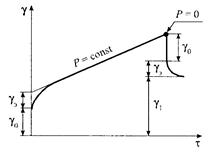
Эластикалық тәртіп механикалық қайтымды, яғни жүкте-мені алғаннан кейін жүйе өзінің бастапқы қалпына қайтып келеді. Бұл жағдайда деформацияның басылуы да уақытқа қарай азаяды (Р =0 жағдайындағы деформациялық қисық). Бұл процесс – кейінгі серпімді әрекет -
 (17.13)
(17.13)
теңдеуімен сипатталады. Мұндағы γ0 – жүктемені алғаннан кейінгі бастапқы деформация.
Кейінгі серпімді әрекет те жүйенің эластикалығына байланысты болғандықтан, оның ұзақтығы деформацияның релаксациялану уақытына (θ) тәуелді.
(17.13)-теңдеуіне сәйкес жоғары эластикалық денелерде деформация тек шексіз ұзақ уақыт аралығында толық жойы-лады. Сондықтан оларда әрқашан қалдықты деформациялар болуы мүмкін.
Басқа да жалпыланған үлгілер белгілі. Мысалы, Максвелл мен Кельвин-Фойгт денелерін тізбектеп біріктірсе, серпімді деформацияланатын, эластикалық және кернеудің релаксация-сына бейім жүйені құрастыруға болады (68-сурет). Мұндай үлгінің деформациялық қисығы 69-суретте келтірілген.
|
|
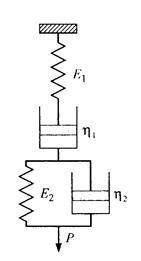
Бұл үлгінің математикалық түрін келесі теңдеумен бейнелеуге болады (Р=const):
 . (17.14)
. (17.14)
|
|
|
|
|
Дата добавления: 2014-12-24; Просмотров: 814; Нарушение авторских прав?; Мы поможем в написании вашей работы!