КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Инерционного конвейера. Обработка нагрузочной диаграммы механизма
|
|
|
|
Обработка нагрузочной диаграммы механизма
Инерционные конвейеры применяются для перемещения штучных грузов – заготовок, обрезков металла, руды, угля и других и их разгрузки за счет сил инерции, действующих на грузы, при изменении направления движения конвейера.
Механизм инерционного конвейера связан с желобом, совершающим возвратно-поступательное движение для перемещения грузов в одном направлении.
При движении желоба в направлении перемещения груза его скорость на большей длине хода возрастает. При изменении направления движения желоба на противоположное груз под действием сил инерции перемещается по желобу в том же направлении и перегружается в бункер или на другой конвейер.
Обработку нагрузочной диаграммы рассмотрим для механизма конвейера, представленного на рис. 32.
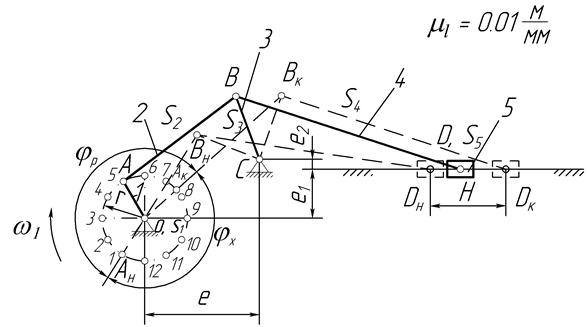
Рисунок 32 – Схема механизма инерционного конвейера
Схема механизма задана размерами звеньев, относительным положением кинематических пар, связанных со стойкой, и положением центров масс звеньев:
lOA = 0,14 м; lAВ = 0,42 м; lВС = 0,2 м; lВD = 0,7 м; е = 0,34 м; e1 = 0,115 м; e2 = 0,05м;  = 0,5 lAВ;
= 0,5 lAВ;  =
=  = 0,5 lВC;
= 0,5 lВC;  = 0,5 lВD .
= 0,5 lВD .
Кроме того, заданы параметры:
Частота вращения электродвигателя nдв = 1260 об/мин;
Частота вращения кривошипа n1 = 63 об/мин;
Угловая скорость кривошипа  .
.
Массы звеньев рычажного механизма, [кг]:
m2 = 18; m3 = 20; m4=95; масса желоба mЖ = 450 кг; масса перемещаемого груза mГ = 800 кг.
Моменты инерции звеньев, [кгм2]:
 = 1,0;
= 1,0;  = 0,04;
= 0,04;  =1,5;
=1,5;  = 4,2; ротора двигателя Jдв = 0,3.
= 4,2; ротора двигателя Jдв = 0,3.
Силы сопротивления при движении желоба; [кН]:
При движении в направлении перемещения груза  = 1,5;
= 1,5;
При обратном ходе  = 2,5.
= 2,5.
Нагружение механизма конвейера задается силами сопротивления движению желоба в направлении перемещения груза и в обратном направлении. При движении в обратном направлении эти силы больше, так как к силам сопротивления добавляются силы трения груза о желоб при их разгрузке и перемещении против движения желоба под действием сил инерции.
Ход желоба Н определяется его крайними положениями в точках Dн и Dк, соответствующими расположению кривошипа ОА на одной линии с шатуном АВ. За начальное положение при построении планов механизма принимается его крайнее положение, при котором эта линия проходит через точки Ан, О, Вн. Другое крайнее положение соответствует прохождению этой линии через точки О, Ак, Вк.
После разметки положений кривошипа и других звеньев за цикл установившегося движения можно сразу построить расчетную нагрузочную диаграмму РС(j) (рис. 33). Для этого по крайним положениям желоба (на рис. 32 поз. 5) в точках Dн и Dк обратным построением планов механизма определяют углы jР и jХ поворота кривошипа ОА при движении желоба в прямом и обратном направлении, на оси абсцисс диаграммы наносят эти углы и на этих углах показывают значения заданных сил сопротивления и  .
.
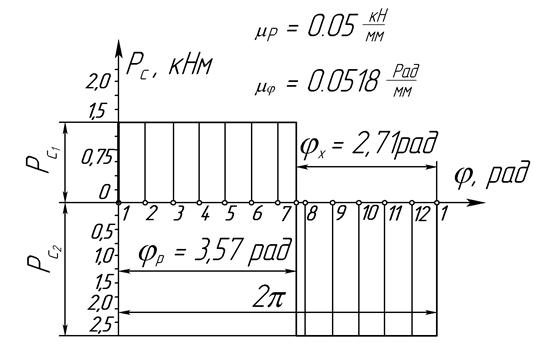
Рисунок 33 – Расчетная нагрузочная диаграмма механизма конвейера
Приведенные моменты сил сопротивления  в каждом положении механизма определены с учетом веса звеньев по заданным массам. На рис. 34 показаны рычаги Жуковского для положения 5 кривошипа ОА механизма (рис. 34, а), выделенного на рис. 32 жирными линиями, и положения 10 (рис. 34, б), показанного на рис. 35. Сила от веса желоба и перемещаемого груза обозначена
в каждом положении механизма определены с учетом веса звеньев по заданным массам. На рис. 34 показаны рычаги Жуковского для положения 5 кривошипа ОА механизма (рис. 34, а), выделенного на рис. 32 жирными линиями, и положения 10 (рис. 34, б), показанного на рис. 35. Сила от веса желоба и перемещаемого груза обозначена  . Планы скоростей повернуты на 90° по направлению вращения кривошипа ОА. Приведенные силы сопротивления определяются из равенства моментов этих сил сумме моментов сил, действующих на звенья механизма относительно полюса повернутого плана скоростей. В положении механизма (рис. 34, а) приведенная сила
. Планы скоростей повернуты на 90° по направлению вращения кривошипа ОА. Приведенные силы сопротивления определяются из равенства моментов этих сил сумме моментов сил, действующих на звенья механизма относительно полюса повернутого плана скоростей. В положении механизма (рис. 34, а) приведенная сила
 , (61)
, (61)
в положении на рис. 34, б
 , (62)
, (62)
где G2, G3, G4 – силы веса звеньев;
hc1, hc2, h2, h3, h4,  – плечи сил в мм относительно полюса "р" повернутого плана скоростей.
– плечи сил в мм относительно полюса "р" повернутого плана скоростей.
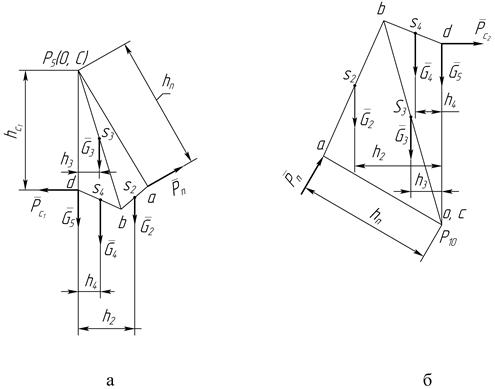
Рисунок 34 – Рычаги Жуковского для механизма инерционного конвейера
в положениях кривошипа ОА5 (а) и ОА10 (б)
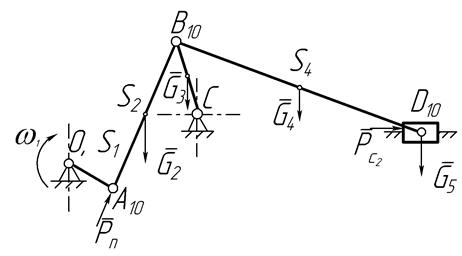
Рисунок 35 – План механизма инерционного конвейера с приложенными
силами в положении кривошипа ОА10
Момент от силы G5 равен нулю, так как равно нулю плечо этой силы относительно полюса «р».
Аналогично определяются приведенные силы в других положениях механизма. Направления моментов приведенных сил и суммарного момента приводимых сил, представляющего собой числитель выражений (61) и (62), должны совпадать. С учетом веса звеньев G2 = 0,176 кН; G3 = 0,196 кН; G4 = 4,414 кН численная величина приведенной силы в положении 5 механизма равна
 ,
,
в положении 10
 .
.
Приведенные моменты сил сопротивления определяются по формуле
 , (63)
, (63)
где lОА – длина звена приведения - кривошипа ОА.
Условимся эти моменты считать положительными, если они направлены против вращения кривошипа ОА. В положениях 5 и 10 кривошипа ОА моменты положительны. При отрицательных значениях моменты будут действовать по направлению угловой скорости w1 кривошипа.
Вычисляя значения приведенных моментов сил сопротивления  по формуле (63), для всех положений механизма строят график этих моментов
по формуле (63), для всех положений механизма строят график этих моментов  (рис. 36, а).
(рис. 36, а).
При построении графика следует иметь в виду, что в крайних положениях желоба конвейера (звена 5 в точках Dн и Dк на рис. 32) значения приведенных сил и моментов сил сопротивления  равны нулю.
равны нулю.
После построения графика  методом графического интегрирования определяют значения и строят график
методом графического интегрирования определяют значения и строят график  работ приведенных моментов сил сопротивления, затем график
работ приведенных моментов сил сопротивления, затем график  работ сил движущих (рис. 36, б) и по нему определяют значение и строят график постоянного приведенного момента сил движущих
работ сил движущих (рис. 36, б) и по нему определяют значение и строят график постоянного приведенного момента сил движущих  (рис. 36, а) в виде горизонтальной прямой (рис. 36, а).
(рис. 36, а) в виде горизонтальной прямой (рис. 36, а).
При графическом интегрировании приведенного момента сил сопротивления число интервалов деления графика по оси абсцисс между положениями 8 и 10 кривошипа увеличено с целью более точного построения графика на этом участке.
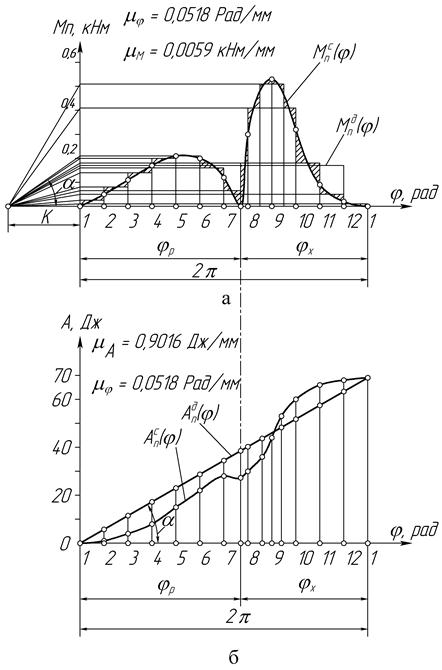
Рисунок 36 – Графики приведенных моментов (а) и работ (б) сил движущих
и сил сопротивления инерционного конвейера
|
|
|
|
|
Дата добавления: 2014-12-26; Просмотров: 1211; Нарушение авторских прав?; Мы поможем в написании вашей работы!