КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Теоретичні відомості. Послідовність виконання роботи
|
|
|
|
Техніка безпеки
Лабораторна робота № 4
Завдання до звіту
Послідовність виконання роботи
1. Вивчити будову і роботу автонапувалки ПА-1 А.
2. Вивчити будову і роботу автонапувалки ПБС-1
3. Вивчити будову і роботу автонапувалки АГК-4А.
4. Оглянути автонапувалку, встановити розміщення і призначення напувальної чаші і клапанно-поплавкового механізму, терморегулятора.
5. З'ясувати, як поповнюється і автоматично регулюється рівень води в чаші та температурний режим автонапувалки.
6. Заповнити звіт.
1. Накреслити і описати технологічну схему роботи автонапувалки.
2. Описати послідовність збирання автонапувалки ПА-1 А.
Питання для самопідготовки
1. Марка автонапувалок, що використовується для напування тварин при прив'язному і безприв'язному способах утримання.
2. Як регулюється температурний режим води в автонапувалці АГК-4А?
Література
1. Ревенко І.І. Механізація тваринництва: Підручник. - К.: Вища освіта, 2004. - С. 69-75
2. Белянчиков М.М. Механізація тваринництва.: Посібник для сільськогосподарських технікумів. – К.: Вища школа, Головне в-во, 1980. -
С. 49-53
Після виконання роботи студент повинен:
Знати: Будову, роботу обладнання для напування тварин.
Вміти: Налагоджувати автонапувалки для їх роботи.
Тема: Вивчення будови та робочого процесу подрібнювача стеблових кормів.
Мета: Вивчити будову, процес роботи, правила експлуатації подрібнювача стеблових кормів.
Обладнання: Макети подрібнювачів стеблових кормів, подрібнювач ИГК-30Б, набір робочого інструменту.
1. Вивчати та регулювати машину тільки після її повної зупинки.
2. Електропривід повинен мати захисні кожухи.
3. Забороняється відкривати кожух різальних апаратів до повної зупинки подрібнюючих пристроїв.
4. Забороняється ставити інструменти на корпус машини.
Подрібнювач грубих кормів ИГК-30Б (рис. 1) призначений для подрібнення соломи, сіна та інших грубих кормів у розсипному стані вологістю до 25 %. Виготовляють у двох модифікаціях — з приводом від ВВП трактора класу 1,4 (ИГК-30Б-І) і з приводом від електродвигуна потужністю 30 кВт (стаціонарний варіант, ИГК-30Б-П).
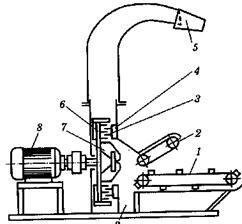
| Рис. 1. Конструктивно-функціональна схема подрібнювана ИГК-30Б: 1 — горизонтальний конвеєр; 2 — похилий конвеєр; 3 — штифти; 4 — нерухомий диск; 5 — дефлектор; 6 — рухомий диск; 7— лопаті вентилятора; 8 — електропривід; 9 — уловлювач важких включень |
Подрібнювач складається з рами, живильника, подрібнювального апарата з кожухом і пневматичного конвеєра.
Живильник має горизонтальний 1 і похилий ущільнювальний 2 конвеєри. Він забезпечує подачу сировини в подрібнювальний апарат і одночасне відокремлення важких включень, які випадають із шару грубих кормів крізь спеціальне вікно, влаштоване знизу приймальної камери. Подрібнювальний апарат складається з нерухомого 4 та рухомого 6 дисків, на яких концентричними рядами розміщені штифти 3, причому активні (рухомі) ряди штифтів чергуються з нерухомими. Кожух подрібнювального апарата оснащений дефлектором 5 для видалення продуктів подрібнення, а також люком для огляду апарата.
Грубі корми подає горизонтальний конвеєр 1, ущільнювальним похилим конвеєром 2 вони дещо ущільнюються і подаються в приймальну камеру. В проміжку між конвеєрами та приймальною камерою важкі включення випадають із шару сировини в уловлювач 9, а солома чи сіно затягуються лопатями вентилятора і спрямовуються в зону подрібнення. В результаті взаємодії рухомих і нерухомих штифтів відбувається розривання, розбивання і перетирання стебел соломи (сіна), які розділяються на часточки упоперек і розщеплюються вздовж волокон. Отримуваний продукт м'який, легко змочується й обробляється розчинами чи парою, його добре поїдають тварини. Розмір часточок 10-70 мм. Слід пам'ятати, що збільшення вологості сировини підвищує питомі витрати енергії, знижує продуктивність машини і погіршує якість продукту.
Ступінь подрібнення можна регулювати симетричною зміною кількості штифтів подрібнювального апарата, причому краще це робити стосовно нерухомих штифтів, оскільки зміна рухомих може призвести до порушення балансування ротора. Крім того, в разі переробки сировини вологістю понад 20% для зменшення швидкості подачі на вал редуктора встановлюють зірочку з числом зубів 15, а на проміжний вал — 20.
Подрібнювач ИГК-Ф-4 порівняно з ИГК-30Б має в 1,5 раза потужніший привід і забезпечує вищу продуктивність. Крім того, він оснащений поперечним конвеєром для видалення важких домішок.
Соломорізку РСС-6 (рис. 2) можна переобладнати і для різання силосу. Вона складається з рами з колісним ходом, живильного транспортера, живильних вальців, різального апарата, механізму привода і відвідних труб з дефлектором. Робочий орган соломорізки — дволопатевий крилач. Він закріплений на головному валу і несе два ножі з кривими лезами. Ножі прикріплюють до бокових площин крилача за допомогою болтів. Величину зазора різальної пари ніж — протирізальна пластина регулюють, змінюючи положення леза ножа відносно вертикальної площини за допомогою регулювальних гвинтів 4, Крилач обертається в кожусі, до патрубка якого приєднують відвідні труби для подрібненого продукту.
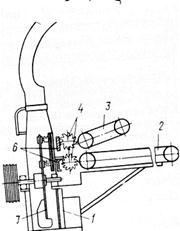 Механізм подачі складається з планчастого транспортера 8 і вальців 7. Верхній валець виконано плаваючим у вертикальній площині в напрямних прорізах боковий горловини. Механізм привода складається з трьох пар циліндричних шестерень, ланцюгової передачі механізму перемикання — храпової муфти, що переміщується по проміжному валу вздовж шпонки за допомогою скоби керування і важільної системи. Муфта входить у зачеплення з однією з вільно посаджених на валу конічних шестерень, що передають обертання великій конічній шестерні довгого проміжного вала. При зміні позиції кранової муфти змінюється напрям обертання механізму подачі. У нейтральному положенні муфти механізм подачі вимкнутий. Працює соломорізка РСС-6 від вала відбору потужності трактора або від електродвигуна. Модернізована соломосилосорізка РСС-6А обладнана власним електродвигуном і клиноремінною передачею.
Механізм подачі складається з планчастого транспортера 8 і вальців 7. Верхній валець виконано плаваючим у вертикальній площині в напрямних прорізах боковий горловини. Механізм привода складається з трьох пар циліндричних шестерень, ланцюгової передачі механізму перемикання — храпової муфти, що переміщується по проміжному валу вздовж шпонки за допомогою скоби керування і важільної системи. Муфта входить у зачеплення з однією з вільно посаджених на валу конічних шестерень, що передають обертання великій конічній шестерні довгого проміжного вала. При зміні позиції кранової муфти змінюється напрям обертання механізму подачі. У нейтральному положенні муфти механізм подачі вимкнутий. Працює соломорізка РСС-6 від вала відбору потужності трактора або від електродвигуна. Модернізована соломосилосорізка РСС-6А обладнана власним електродвигуном і клиноремінною передачею.
Порядок роботи на соломорізці такий. При нейтральному положенні скоби керування запускають двигун. Коли буде досягнуто робочої частоти обертання, переміщують скобу вперед до крилача, вмикаючи зворотний хід живильного пристрою, щоб звільнити його від випадкових предметів. Потім включають робочий хід. Перевіряють стан машини на слух і візуально. Через 10...12 хв роботи на холостому ходу, коли встановлена повна справність машини, подають продукт на транспортер. Довжина січки залежить від змінних шестерень, які перебувають у зачепленні. Три пари змінних шестерень дають змогу одержати шість довжин січки: 104, 75, 40, 25 і 6 мм. Соломосилосорізку РСС-6,0Б (рис. 2) випускають з власним електродвигуном і в варіанті з приводом від ВВП трактора. РСС-6.0Б має дисковий різальний апарат з шістьма плоскими ножами з прямим, коректованим лезом. живильний пристрій підпресовуючих живильних валиків. Довжину січки 10, 15, 20...40, 30...60 і 120 мм регулюють зміною шестерень у приводі живильного пристрою і зняттям ножів з диска. Для відведення січки диск має три лопаті.
|
|
|
|
|
Дата добавления: 2015-03-29; Просмотров: 1477; Нарушение авторских прав?; Мы поможем в написании вашей работы!