КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Михаил Чехов об искусстве актера 1 страница
|
|
|
|
Техническое проектирование
Техническое предложение
Техническое задание
САР с регулятором и наблюдателем в контуре управления.
САР с корректирующим устройством;
Составляю математическое описание объекта управления, исполнительных и измерительных устройств. Производиться сравнительная характеристика синтезированных систем на основании полученных ЛАЧХ и ЛФЧХ и графиков переходных процессов. Анализируется чувствительность и инвариантность синтезированных систем, а так же анализируется система с учетом нелинейностей.
Содержание
1. Техническое задание
1.1 Введение
1.2 Технические требования
1.3 Технические параметры
2 Техническое предложение
2.1 Обзор литературы
2.2 Технические характеристики
2.3 Выводы
3 Техническое проектирование
3.1 Математическое описание системы
3.2 Синтез последовательного корректирующего устройства
3.3 Формирование ВММ системы
3.4 Каноническая форма уравнений состояния, управляемости
и наблюдаемости
3.5 Синтез САР методом модального управления
3.6 Построение графика переходного процесса
3.7 Анализ основных характеристик синтезированной
системы
3.8 Проверка системы и инвариантность
3.9 Анализ синтезированной САУ с учетом нелинейности
3.10 Определение коэффициентов чувствительности замкнутой
системы с регулятором и наблюдателем методом
имитационного моделирования
Список используемой литературы
Приложение
Список условных обозначений, сокращений символов,
единиц и терминов.
1.Аббревиатуры
1.1. АФЧХ – амплитудно-фазовая частотная характеристика
1.2. АЧХ – амплитудная частотная характеристика
1.3. ВММ – векторно-матричная модель
1.4. ЛЧХ – логарифмическая частотная характеристика
1.5. ОС – обратная связь
1.6. САР – система автоматического регулирования
1.7. ТЗ – техническое задание
1.8. ФЧХ – фазовые частотные характеристики
2.Обозначение
1.1. А – матрица состояния
1.2. А(w) – АЧХ
1.3. В – матрица управления
1.4. С – матрица выхода
1.5. det –детерминант
1.6. Qn – матрица наблюдаемости
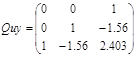
1.7. Qy – матрица управляемости
1.8. W(s) – передаточная функция
1.9. X – вектор фазовых координат
1.10. Y – выходной вектор
1.1. Введение.
Настоящее техническое задание распространяется на разработку и испытание САР подачи раствора в сушильную камеру, предназначенное для получения порошка из глиняной суспензии.
1.2. Технические требования.
В состав системы входят: усилитель, таймер, клапан, датчик влажности, объектом управления является распылительная сушилка с нижней подачей суспензии, разработанной в НИИСтройкерамики с соплом форсунки Ж5.
1.3. Технические параметры:
длительность переходного процесса 3с;
количество перерегулирований 1;
колебательность 1;
величина перерегулирования 30%;
ошибка в установившемся состоянии ±5%;
запас устойчивости по фазе ³20..300;
запас устойчивости по модулю ³10..15дб.
Окончательные требования к потребляемой мощности, чувствительности и инвариантности системы уточняют в процессе разработки и согласовывают с руководителем доцентом Савиных А.Б., а также уточняются и требования к надежности САУ.
2.1. Обзор литературы.
В настоящее время автоматизируются практически все сферы деятельности людей, поэтому тема данного курсового проекта является очень актуальной. Часто автоматизация какого-либо процесса используется либо для экономической выгоды, либо для необходимости, как в данном случае.
САР могут быть реализованы различными способами. В зависимости от характера алгоритмов функционирования различают следующие классы САР:
1. программные
2. стабилизирующие
3. следящие
К задачам, которые необходимо решить при разработке системы, относятся:
1) Синтез наблюдателя и регулятора САУ
2) Обеспечение заданных критериев качества управляемости
3) Обеспечение минимальных значений чувствительности
4) Обеспечение инвариантности системы
Одним из возможных вариантов реализации САУ является:
- САУ с корректирующим устройством
- САУ с регулятором и наблюдателем в контуре управления
Первый вариант предпочтительнее в тех случаях, когда необходимо наиболее простое конструктивное решение при невысоких критериях качества управления. Во всех остальных случаях предпочтителен второй вариант.
САР с регулятором и наблюдателем в контуре управления обладает лучшими характеристиками по сравнению с САУ с корректирующим устройством. Это видно при сравнении их ЛАЧХ, ЛФЧХ и графиков переходных процессов.
2.2.Обоснование выбора элементов системы.
В состав системы входят: усилитель, таймер, клапан, данные влажности. Технические средства, выбираемые для реализации системы, должны обосновать малую потребляемую мощность, необходимое быстродействие, габариты и нормальное функционирование в условиях эксплуатации системы.
Выбор усилителя.
Критерий отбора усилителя – возможность установления необходимого коэффициента усиления и простота конструктивного исполнения.
Выбор таймера.
В качестве таймера выбираем микроконтроллер МС1784H16 семейства Motorola.
Выбор датчика.
В качестве датчика влажности выбираем емкостной датчик влажности фирмы Valvo. Он не дорогой и прост в обращении. Имеет очень малую нелинейность. С помощью соответствующей измерительной схемы изменения емкости легко преобразовать в постоянное напряжение.
3.1. Математическое описание системы.
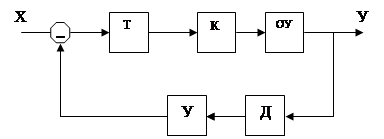 |
Рис. 3.1.1
Т – таймер
К – клапан
ОУ – объект управления
Д – датчик влажности
У – усилитель
Описание таймера.
Уравнение работы таймера можно получить из графика (рис 3.1.)
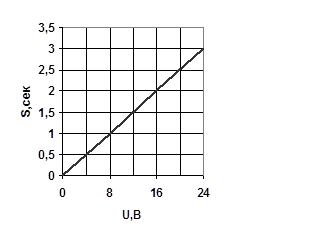
Рис 3.1.2. График работы таймера.
Приведем к безразмерному виду.
Примем:
 , где
, где  =1сек.
=1сек.
 , где
, где 
Используя преобразование Лапласа, получим
 или
или 

Рассчитаем передаточное отношение клапана.
Работа клапана описывается следующим уравнением:
 , где Q - количество суспензии,
, где Q - количество суспензии,
V - объемный расход,
S - длительность работы (период).
 , где f - площадь выходного отверстия клапана,
, где f - площадь выходного отверстия клапана,
ω - средняя скорость жидкости.
 , где d - диаметр.
, где d - диаметр.
 В нашем случаи d=0.05 м, ω=2 м/c
В нашем случаи d=0.05 м, ω=2 м/c

Приведем к безразмерному виду. Примем:
 , где
, где 
 , где
, где 
Получим передаточную функцию клапана:

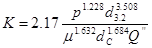
Рассчитаем передаточную функцию объекта управления.
Экспериментально было установлено, что:
 , где W0 – влажность суспензии в %,
, где W0 – влажность суспензии в %,
M – коэффициент расхода,
 – диаметр сопла форсунки в мм,
– диаметр сопла форсунки в мм,
P – давление в атм,
 - объемно-поверхностный диаметр
- объемно-поверхностный диаметр
гранул в мм.
 , где Vg - действующий расход в м3/с,
, где Vg - действующий расход в м3/с,
 – объемный вес жидкости в г/см3.
– объемный вес жидкости в г/см3.
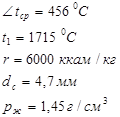
Для описания работы также используется следующее уравнение:
 , где
, где  - средняя логарифмическая
- средняя логарифмическая
температура в 0С,
 – начальная температура процесса в 0С,
– начальная температура процесса в 0С,
 - уровень установки форсунки в мм.
- уровень установки форсунки в мм.
При описании процессов, происходящих в объекте управления, используем уравнение:
 , где
, где  - количество влажности в единицу
- количество влажности в единицу
времени.
 , где V - объем сушильной камеры,
, где V - объем сушильной камеры,
U - скорость молекул,
x - величина свободного пробега.
 ,
,
где [U] – среднее значение скорости гранул,
[λ] – средняя длина свободного пробега,
V – удельный объем.
Из выше перечисленных формул и уравнений получаем, что:
Для того, чтобы получить в безразмерной форме, произведем замену:
 , где
, где 

 , где
, где 
Для распылительной сушилки с нижней подачей суспензии, разработанной в НИИСтройкерамики с форсункой, разработанной в НИИСтройкерамики с соплом формы Ж5 (ГОСТ 10284-62) известны следующие значения:



Рассчитаем передаточную функцию датчика влажности. Для датчика влажности фирмы Valvo найдена передаточная функция вида:
 , где ν- коэффициент чувствительности,
, где ν- коэффициент чувствительности,
T - период срабатывания.
 ,
,
где Umax – максимальное напряжение на выходе датчика,
Wmax – соответствующая влажность на входе.
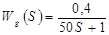
Чтобы привести к безразмерному виду, надо заменить:
 , где
, где 
 , где
, где 
Тогда 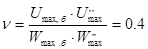
По графику рис.6.33 стр118/6/ найдем T=50сек.
Тогда передаточная функция примет вид:
Рассчитаем коэффициент усиления K:

Коэффициент рассчитывается из того предположения, что при минимальной возможности готового продукта на выходе из сушильной камеры датчик формирует ЭДС, равную 12В. А на таймер после вычитания должно поступать напряжение, стремящееся к 0В.
3.2.Синтезпоследовательногокорректирующегоустройства.
По передаточной функции разомкнутой системы определяем сопрягающие частоты и общий коэффициент усиления:

 ,
, 
 .
.
ЛАЧХ и ЛФЧХ нескорректированной системы приведены в приложении 2.
Построим желаемую ЛАЧХ.
Желаемое время переходного процесса Tп.п=3с.
Рассчитаем частоту среза желаемой ЛАЧХ. Так как  =30%, то по графику рис.7.13 стр.343/1/ можно определить максимальное значение вещественной характеристики:
=30%, то по графику рис.7.13 стр.343/1/ можно определить максимальное значение вещественной характеристики:
 .
.
Вычитая из желаемой ЛАЧХ действительную, получим ЛАЧХ корректирующего устройства и его передаточную функцию
 ,
,
где 
 Получим передаточную функцию двух дифференцирующих RC-контуров, схемы которых приведены на рис.3.2.1:
Получим передаточную функцию двух дифференцирующих RC-контуров, схемы которых приведены на рис.3.2.1:
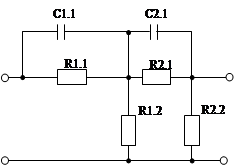
Рис.3.2.1 Схема дифференцирующих RC-контуров.

где T1=50, T2= 0,65, T3=0,1
Возьмем R1.1=1Мом, тогда C1.1=50мкФ. Из формулы (1) найдем R1.2=74 Мом. Выберем из ряда R1.2=70 Мом.
Выберем R2.1=100 кОм, тогда C2.1=6 мкФ, ≈5мкФ. Из формулы (2) найдем R2.2=550 кОм.
R1.2=70 МОм R1.1=1 МОм
R2.2=550 кОм R2.1=100 кОМ
C1.1=50 мкФ C2.1=5 мкФ
Построение переходной функции методом трапецеидальных
частотных характеристик
Для построения передаточной функции воспользуемся передаточной функцией замкнутой системы с фильтром.

Заменим, оператор Лапласа S на (jω) и выразим вещественную часть:

Построим график вещественной характеристики:
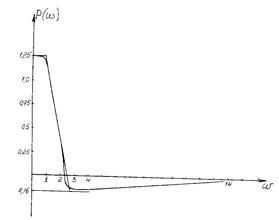
Рис.3.2.2. График вещественной характеристики.
Разобьем ее на две трапеции, со следующими параметрами:



| Τ | h11(τ) | 
| h1(t) | Τ | h12(τ) | 
| h2(t) |
| 0.5 | 0.192 | 0.2 | 0.26 | 0.5 | 0.199 | 0.04 | |
| 0.371 | 0.4 | 0.50 | 0.386 | 0.07 | 0.03 | ||
| 1.5 | 0.538 | 0.6 | 0.73 | 1.5 | 0.560 | 0.11 | 0.06 |
| 0.682 | 0.8 | 0.92 | 0.709 | 0.14 | 0.08 | ||
| 0.895 | 1.2 | 1.21 | 0.928 | 0.21 | 0.14 | ||
| 1.002 | 1.6 | 1.35 | 1.039 | 0.29 | 0.15 | ||
| 1.042 | 2.0 | 1.40 | 1.067 | 0.36 | 0.17 | ||
| 1.048 | 2.4 | 1.41 | 1.054 | 0.43 | 0.17 | ||
| 1.045 | 2.8 | 1.40 | 1.048 | 0.50 | 0.17 | ||
| 1.037 | 3.2 | 1.39 | 1.047 | 0.57 | 0.17 | ||
| 1.028 | 3.6 | 1.39 | 1.035 | 0.64 | 0.17 | ||
| 1.032 | 4.0 | 1.38 | 1.046 | 0.72 | 0.17 | ||
| 1.035 | 4.4 | 1.39 | |||||
| 1.036 | 4.8 | 1.39 |
График переходного процесса приведен в приложении 4.
Вывод: синтезирование САР с последовательным корректирующим
устройством имеет следующие характеристики
- время переходного процесса 3с
- количество нерегулирований 1
- колебательность 1
- величина нерегулирования 0,36%
- запас устойчивости по фазе 450
- запас устойчивости по амплитуде 5,012 Дб
В результате все технические параметры, соответствуют параметрам, заданным в техническом задании, кроме запаса устойчивости по амплитуде.
3.3 Формирование ВММ.
Сформируем граф системы:
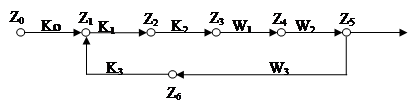 Рис.3.3.1. Граф системы.
Рис.3.3.1. Граф системы.
Детализируем этот граф:
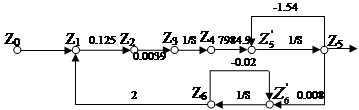 Рис.3.3.2. Детализированный граф системы.
Рис.3.3.2. Детализированный граф системы.
По детализированному графу системы составим детализированную
структурную матрицу
Z1 Z2 Z3 Z4 Z5’ Z5 Z’6 Z6 Z0 Z6’ Z6 Z0
| 0.125 | ||||||||
| 0.0039 | ||||||||
| S | ||||||||
| 7984.9 | -1.54 | |||||||
| S | ||||||||
| 0.008 | -0.02 | |||||||
| S | ||||||||
| VT |
Сформируем ВММ:
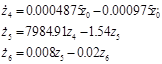
Следовательно:
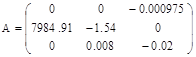

3.3. Формирование ВММ системы.
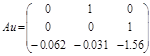
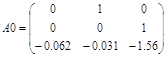
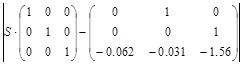
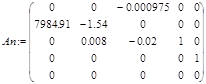
Матрица состояния А: 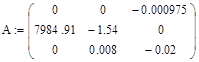
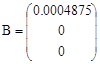
Матрица управления В: 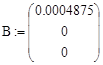
Матрица выхода С: 
Таким образом, матричные уравнения системы выглядят так:


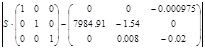
Составим матрицы управляемости Qy и наблюдаемости Qn:



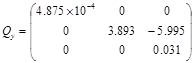

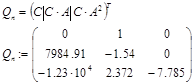

Так как ранг матрицы Qy и Qn равны трем, то система и управляема и наблюдаема.
3.4. Каноническая форма управлений состояния, управляемости и
наблюдаемости системы.
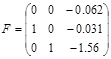
Приведем систему к канонической форме управляемости, для чего составим, в первую очередь, матрицу Фробениуса F:


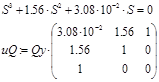
Найдем матрицу перехода к К.Ф.У. uQ:
XY нашей системы:
Вычислим в новом базисе матрицы управляемости, наблюдаемости и матрицы уравнений состояния системы:





Таким образом, матричные уравнения системы в новом базисе будут выглядеть:

3.5.Синтез САУ методом модального управления
Проверим управляемость системы:



Определим вектор К:
XY нашей системы:

Отсюда: 
Сами назначим расположение корней:
Пусть желаемое время переходного процесса равно 3 сек
Тогда степень устойчивости:




Тогда: 

Третий корень возьмем дальше от мнимой оси, чтобы увеличить коэффициент затухания



Находим компоненты вектора К:





Запишем вектор  для расширенной системы:
для расширенной системы:


Запишем матрицы наблюдателя:

Составим матрицу наблюдаемости  для расширенной системы:
для расширенной системы:



|
|
|
|
|
Дата добавления: 2015-03-29; Просмотров: 587; Нарушение авторских прав?; Мы поможем в написании вашей работы!