КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Обработка индикаторной диаграммы и определение внешних сил,
|
|
|
|
Определение кинематических характеристик кривошипно-ползунного механизма и контрольный расчет их для положения №2 (аналитически).
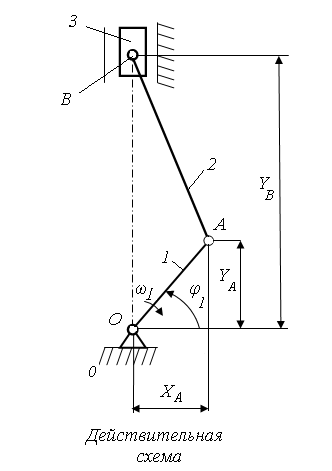
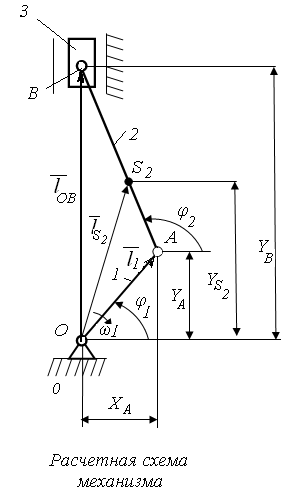
Кинематические характеристики определяются по формулам, выведенным для метода замкнутого векторного контура.
Расчет кинематических характеристик:
1.  =0,06·0,5=0,03 (м);
=0,06·0,5=0,03 (м);
2.  =0,06·0,866=0,052 (м);
=0,06·0,866=0,052 (м);
3.  =0,06+
=0,06+ 
4.  =(
=( )/
)/ 
 0,03)/0,240=
0,03)/0,240=  0,125
0,125
5.  =(
=( )/ (0,298 – 0,052)/0,240=0.99;
)/ (0,298 – 0,052)/0,240=0.99;
6.  =
=  -0,22
-0,22
7.  +
+  =0,06·0,5+0,240·(
=0,06·0,5+0,240·( )=0,037(м).
)=0,037(м).
8.  +
+  =
=
=  =
= 
9.  =
=
=  −0,0595(м);
−0,0595(м);
10.  =0,03 +0,084·(−0,125) = 0,0195 (м);
=0,03 +0,084·(−0,125) = 0,0195 (м);
11.  =0,052 +0,084·0,99 =0,135 (м);
=0,052 +0,084·0,99 =0,135 (м);
12.  =
=
 -0,06∙0,866 - (-0,22) ·0,084·0,99= -0,034 (м);
-0,06∙0,866 - (-0,22) ·0,084·0,99= -0,034 (м);
13. 
= 0,06·0,5+(−0,22)·0,084·(−0,125) = 0,048 (м);
14.  −
−  =
=
 =−0,06·0,5-(-
=−0,06·0,5-(-  ·0,084 0,99 - 0,084·
·0,084 0,99 - 0,084·  (-0,125) = − 0,035(м);
(-0,125) = − 0,035(м);
15.  −
−  =
=
 =−0,047·0,866+(-0,076) ·0,117 ·(-0,133) - 0,117 ·
=−0,047·0,866+(-0,076) ·0,117 ·(-0,133) - 0,117 ·  ·0,99 = -0,289 (м);
·0,99 = -0,289 (м);
16.  =
=  =
=  ;
;
17.  =0,03−0,298=0,002 (м);
=0,03−0,298=0,002 (м);
Для сравнения произведем определение кинематических характеристик построением плана аналогов скоростей. Для построения плана аналогов скоростей примем  =
=  . В этом случае отрезок Pa изображает аналог скорости точки А: Pа=ОА. Известно, что Pа
. В этом случае отрезок Pa изображает аналог скорости точки А: Pа=ОА. Известно, что Pа  ОА. Поскольку между скоростями и аналогами скоростей существует пропорциональность, то для точки В записываются аналогичные векторные уравнения:
ОА. Поскольку между скоростями и аналогами скоростей существует пропорциональность, то для точки В записываются аналогичные векторные уравнения:


Построение точки  на плане находим по теореме подобия. Произведем графические расчеты
на плане находим по теореме подобия. Произведем графические расчеты
 =
=  = pb
= pb  = 36·0,001=0,036 (м);
= 36·0,001=0,036 (м);
 = ab
= ab  ab
ab  0,217;
0,217;
 = p
= p  =0,046 (м);
=0,046 (м);
Сопоставление расчетов  :
:

| 
| |
| Аналитический | -0,220 | 0,037 |
| Графический | -0,217 | 0,036 |
|
|
|
|
|
Дата добавления: 2015-03-29; Просмотров: 369; Нарушение авторских прав?; Мы поможем в написании вашей работы!