КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Определение переменной составляющей приведенного момента инерции и его производной
|
|
|
|
Определение приведенных моментов сил сопротивления и движущих сил.
Определение  выполняется из условия равенства мгновенных мощностей:
выполняется из условия равенства мгновенных мощностей:
·  =
= 
Откуда =  ·sign(
·sign( ), где
), где
 проекции силы
проекции силы  на оси координат;
на оси координат;
 проекции аналогов скорости точки приложения силы
проекции аналогов скорости точки приложения силы  ;
;
 передаточная функция от i-го звена, к которому приложен момент, к звену 1
передаточная функция от i-го звена, к которому приложен момент, к звену 1
sign()= -1 при направлении вращении звена 1 по часовой стрелке.
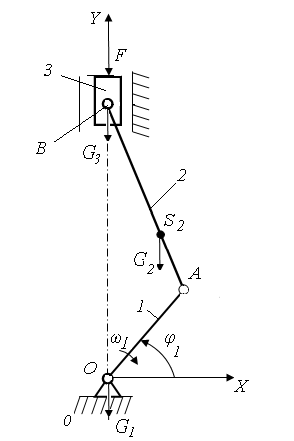
Для вертикального механизма получаем:
 =
=  ·sign()=
·sign()= 
Сила  в изображенном случае отрицательна. Во втором положении:
в изображенном случае отрицательна. Во втором положении:
=  =1608,33м
=1608,33м
Приведенный момент  определяется из условия, что при установившемся режиме движения изменение кинетической энергии машины за цикл =0, т.е.
определяется из условия, что при установившемся режиме движения изменение кинетической энергии машины за цикл =0, т.е.
 T=
T=  , и за цикл
, и за цикл 
Работа движущих сил вычисляется по формуле:
Интегрирование выполняется численным методом по правилу трапеций
 ·
· 
где  шаг интегрирования в радианах
шаг интегрирования в радианах
С учетом  при
при 

Переменная составляющая  определяется из условия равенства кинетических энергий, т.е. кинетическая энергия звена привидения, имеющего момент инерции
определяется из условия равенства кинетических энергий, т.е. кинетическая энергия звена привидения, имеющего момент инерции  , равна сумме кинетических энергий звеньев, характеризуемых переменными передаточными функциями:
, равна сумме кинетических энергий звеньев, характеризуемых переменными передаточными функциями:

Разделив это выражение на  , с учетом того, что
, с учетом того, что  ,
,
получим:

 = 0,089кг·
= 0,089кг· 
Производная  необходимая в последующем для определения закона движения звена приведения, имеет вид:
необходимая в последующем для определения закона движения звена приведения, имеет вид:
 sign(
sign( =0,002 кг·
=0,002 кг· 
3.6.3 Определение постоянной составляющей приведенного момента инерции  и момента инерции маховика.
и момента инерции маховика.  .
.
В основу расчета положен метод Н.И. Мерцалова. Для определения изменения кинетической энергии машины  предварительно определяем работу движущих сил
предварительно определяем работу движущих сил  . Для i-гo положения:
. Для i-гo положения:
 где
где 
Тогда 
Изменение кинетической энергии  звеньев с постоянным приведенным моментом инерции
звеньев с постоянным приведенным моментом инерции  равно:
равно:
 ,
,
где  - кинетическая энергия звеньев, создающих переменную составляющую
- кинетическая энергия звеньев, создающих переменную составляющую  . Пометоду Мерцалова, определяется приближенно по средней угловой скорости
. Пометоду Мерцалова, определяется приближенно по средней угловой скорости  :
:
Далее из полученного за цикл массива значений , находим максимальную  и
и  величины используя которые, вычисляем максимальный перепад кинетической энергии:
величины используя которые, вычисляем максимальный перепад кинетической энергии:

Тогда необходимая величина , при которой имеет место вращение звена приведения с заданным коэффициентом неравномерности  , равна:
, равна:

Момент инерции маховика определяется как 
 приведенный момент инерции всех вращающихся масс машины (ротора, зубчатых колес, кривошипа).
приведенный момент инерции всех вращающихся масс машины (ротора, зубчатых колес, кривошипа).  задано вусловии курсового проекта.
задано вусловии курсового проекта.
Иногда величина  может оказаться больше полученного значения . Этоозначает, что не требуется установки маховика.
может оказаться больше полученного значения . Этоозначает, что не требуется установки маховика.



|
|
|
|
|
Дата добавления: 2015-03-29; Просмотров: 540; Нарушение авторских прав?; Мы поможем в написании вашей работы!