КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Статические и динамические характеристики
|
|
|
|
Общие сведения о системах управления. Структурная схема одноконтурной САР и принцип ее действия.
Система управления – совокупность средств, используемых для управления, персонал, принимающий непосредственное участие в управлении вместе с ТОУ. Эффективность работы системы управления оценивается критериями и показателями, имеющими технологический смысл (температура, качество, количество, себестоимость, выход целевого продукта и т. д.)
Задача, поставленная перед системой управления (постоянство температуры и т.д.) называется целью управления. Можно выделить следующие типы систем управления:
- ручного управления (функции управления выполняет оператор, дистанционное управление);
-автоматического контроля и ручного дистанционного управления (автоматизации подвергаются функции сбора информации);
- частичной автоматизации;
-комплексной автоматизации (кроме обеспечения режима нормальной эксплуатации, реализуются функции и процедуры пуска, останова, аварийного отключения ТОУ);
- полной автоматизации.
Структурная схема одноконтурной САУ промышленным объектом управления приведена на рис. 1.1. Основными элементами ее являются: АР - автоматический регулятор, УМ - усилитель мощности, ИМ - исполнительный механизм, РО - регулирующий орган, СОУ - собственно объект управления, ИПУ - измерительно-преобразовательное устройство, ЗУ - задающее устройство, ЭС - элемент сравнения.
Рис.1.1. Функциональная схема САУ.
Координаты (переменные) системы:
g(t) - задающее воздействие;
y(t) - управляемая (регулируемая) величина;
f(t) - возмущающее воздействие;
е(t) - рассогласование (ошибка);
u(t) - управляющее воздействие.
Характерной особенностью схемы является наличие ИПУ, обеспечивающего работу автоматического регулятора со стандартными значениями тока или напряжения. Измерительно-преобразовательное устройство выполняет следующие функции: преобразует нестандартный входной сигнал в стандартный выходной; осуществляет фильтрацию входного сигнала; осуществляет линеаризацию статической характеристики датчика с целью получения линейного диапазона.
Для расчетных целей исходную схему упрощают до схемы, включающей в себя только АР - регулятор, Э -элемент сравнения и ОУ - объект управления. Здесь под объектом управления уже понимается неизменяемая часть системы, состоящая из измерительно-преобразовательного устройства, исполнительного механизма, регулирующего органа и собственно объекта управления.
По количеству входных и выходных величин и их взаимосвязи объекты делятся на одномерные (один вход и один выход) и многомерные. Последние могут быть многосвязными - когда наблюдается взаимное влияние каналов регулирования друг на друга, либо несвязные - взаимосвязь между каналами которых мала.
Важным свойством также является поведение параметров системы во времени.
Если в период эксплуатации параметры являются неизменными, то система считается стационарной, в противном случае - нестационарной, например, переменный момент инерции электропривода, потокосцепление в двигателе и т.д. Кроме того, особо выделяются системы с распределенными параметрами, т.е. такие системы, которые содержат распределенные в пространстве элементы, например, длинные электрические линии и т.д.
В зависимости от основной цели задачи управления САР классифицируются следующим образом: системы стабилизации, система программного управления, следящие системы.
В системах стабилизации рабочий параметр объекта (регулируемая величина) поддерживается постоянным во времени при постоянном задании. В системах программного управления рабочий параметр объекта изменяется во времени по заранее известному закону, а соответствии с которым изменяется задание.
В следящих системах рабочий параметр объекта изменяется во времени по заранее неизвестному закону, который определяется каким-то внешним независимым процессом.
В зависимости от количества регулируемых величин системы могут быть одномерными (одна регулируемая величина) или многомерными (несколько регулируемых величин).
По свойствам ошибки (отклонения) в установившемся режиме различают статические и астатические системы. Свойство астатизма системы рассматривают по отношению к конкретному воздействию.
Система, в которой величина установившейся ошибки зависит то величины возмущения при постоянном задании называется статической по возмущению. Если установившаяся ошибка не зависит от величины возмущения, то система является астатической 1-ого порядка. Если установившаяся ошибка не зависит от первой производной возмущающего воздействия, то система является астатической 2-го порядка. Кроме того, различают статизм и астатизм по задающему воздействию. При этом возмущение считается постоянным и установившаяся ошибка рассматривается в зависимости от величины задающего воздействия.
Для повышения показателей работы САУ применяется одно- и много-контурное регулирование с использованием жестких (действуют как во время переходного процесса, так и в установившемся режиме) и гибких (действует только во время переходного процесса) обратных связей.
В зависимости от способов формирования управляющего воздействия различают следующие принципы управления: по возмущению; по отклонению управляемой величины от требуемого значения; принцип комбинированного управления.
Система с принципом управления по возмущению является разомкнутой. Принцип управления по отклонению применяется в замкнутых САУ. В технике широко применяют САУ с принципом комбинированного управления, сочетающим принцип управления по отклонению (корректирующее устройство КУ2) и по возмущению (корректирующее устройство КУ1). (рис.1.2) Благодаря такой структуре системы обладают следующими свойствами:
- с помощью компенсационных связей (КУ1) возможно достижение полной компенсации ошибок (инвариантности), вызываемых основными возмущающими и задающими воздействиями;
- наряду с возможностью компенсации ошибок от основных воздействий снижаются ошибки от второстепенных воздействий с помощью обратной связи (КУ2);
- при нарушении условий компенсации ошибка уменьшается замкнутой системой;
- благодаря наличию разомкнутых компенсационных каналов в комбинированной системе не так остро стоит проблема устойчивости, как в замкнутых САУ.
1. Статические и динамические модели. По признаку учета зависимости объекта моделирования от времени различают статические и динамические характеристики систем, отражаемые в соответствующих моделях. Статические модели (модели статики) отражают функцию системы - конкретное состояние реальной или проектируемой системы (своего рода его «мгновенную фотографию»)
Динамические модели (модели динамики) отражают функционирование системы - процесс изменения состояний реальной или проектируемой системы. Они показывают различия между состояниями, последовательность смены состояний и развитие событий с течением времени. Отличие статических и динамических моделей заключено в учете времени: в статике его как бы не существует, а в динамике это основной элемент.
2. Статические характеристики систем. В узком смысле к статической характеристике системы можно отнести ее структуру. Однако нас чаще будут интересовать свойства системы по преобразованию входов и выходов (т.е. функция системы) в установившемся режиме, когда отсутствуют изменения значений как входных, так и выходных переменных. Такие свойства определяются как статические характеристики.
Статическая характеристика - это зависимость между входной и выходной величинами в установившемся режиме. Статическая характеристика может быть представлена:
-математической моделью вида Y = F(X);
-графической моделью.
3. Динамические характеристики систем. Следующий шаг в исследовании систем состоит в том, чтобы понять и описать, как система «работает», что происходит с ней самой и с окружающей средой в ходе реализации поставленной цели. Для описаний функционирования системы используются динамические модели.
Для разных объектов и систем разработано большое количество динамических моделей, описывающих процессы с различной степенью детальности: от самого общего понятия динамики, движения вообще, до формальных математических моделей конкретных процессов типа уравнений движения в механике или волновых уравнений в теории поля. Свойства динамических систем определяют динамические характеристики.
Динамическая характеристика - это реакция системы на возмущение (зависимость изменения выходных переменных от входных и от времени). Динамическая характеристика может быть представлена:
-математической моделью в виде дифференциального уравнения (или уравнений) вида:

-математической моделью в виде решения дифференциального уравнения;
-графической моделью, состоящей из двух графиков: графика изменения возмущения во времени и графика реакции выхода на это возмущение - графической зависимости изменения выхода во времени.
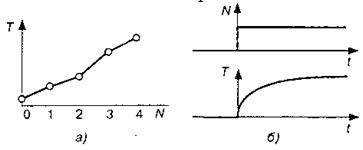
Рис. 1. Статическая (а) и динамическая (б) характеристики
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 8383; Нарушение авторских прав?; Мы поможем в написании вашей работы!