КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Особенности ШИМ-регулирования для управления ИМ постоянной скорости
|
|
|
|
Режим автоколебаний (сущность, особенности и расчет параметров).
Особенности позиционного регулирования. Характеристики, расчеты.
Реализация цифрового ПИД-алгоритма регулирования.
Особенности реализации ПИД-алгоритма регулирования.
ПИД-регулятор. Прибор ОВЕН ТРМ210 осуществляет ПИД-регулирование измеренной величины, управляя "нагревателем" или "холодильником". Настройка коэффициентов ПИД-регулятора на объекте осуществляется автоматически (автонастройка).
Терморегулятор ОВЕН ТРМ210 управляет нагрузкой одним из двух методов:
импульсным (если выход ПИД-регулятора - э/м реле, транзисторная оптопара, симисторная оптопара, выход для управления внешним твердотельным реле);
аналоговым (если выход ПИД-регулятора - ЦАП 4...20 мА или 0...10 В).

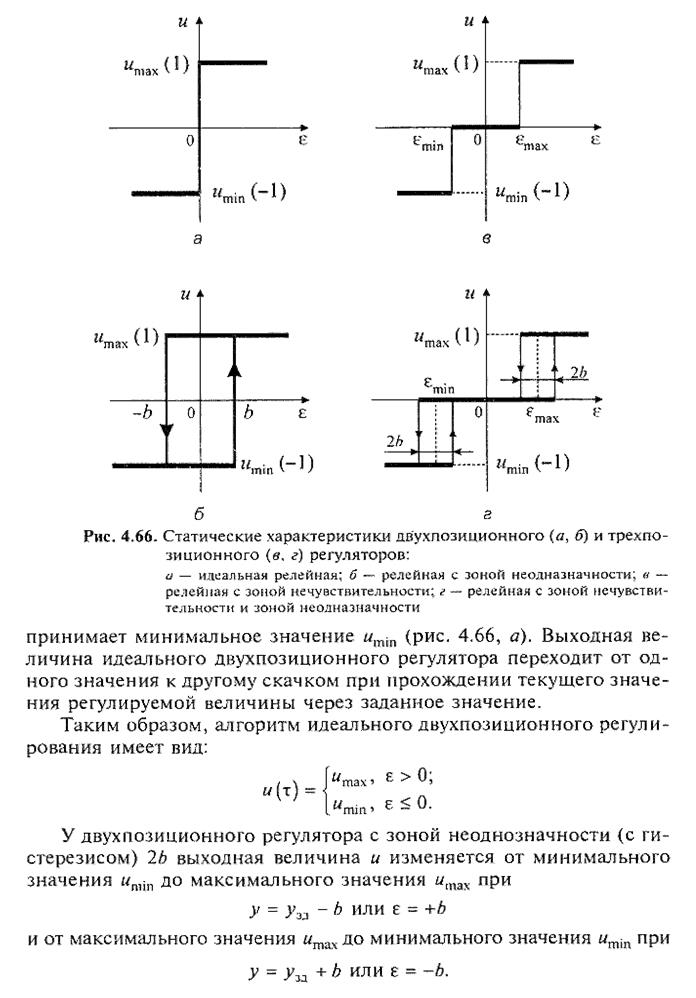
Промышленные регуляторы, как отмечалось выше, выполняют свою основную задачу управления с помощью 2-х типов принципиально различных алгоритмов: линейных (ПИ, ПИД и т. д.) и нелинейных.
Нелинейные регуляторы представляют устройства, в состав которых входят элементы, имеющие существенно - нелинейную характеристику. Если решать задачу управления с использованием максимальной мощности регулирующего воздействия (задача максимального быстродействия), то наиболее простое конструктивное исполнение возникает при применении релейных устройств (элементы с кусочно-постоянной статической характеристикой). Например, 2-х позиционного реле.
Рассмотрим вариант позиционного регулятора, имеющего симметрическую статическую характеристику 2-х позиционного реле. Выходной  сигнал релейного устройства равен μm, при определенном порогового значении Δ входного сигнала. Такое реле характеризуется зоной неоднозначности 2Δ. (Особенность: петля гистерезиса – направление изменения сигнала против часовой стрелки). Управляющее воздействие принимает два конечно-постоянных значения.
сигнал релейного устройства равен μm, при определенном порогового значении Δ входного сигнала. Такое реле характеризуется зоной неоднозначности 2Δ. (Особенность: петля гистерезиса – направление изменения сигнала против часовой стрелки). Управляющее воздействие принимает два конечно-постоянных значения.
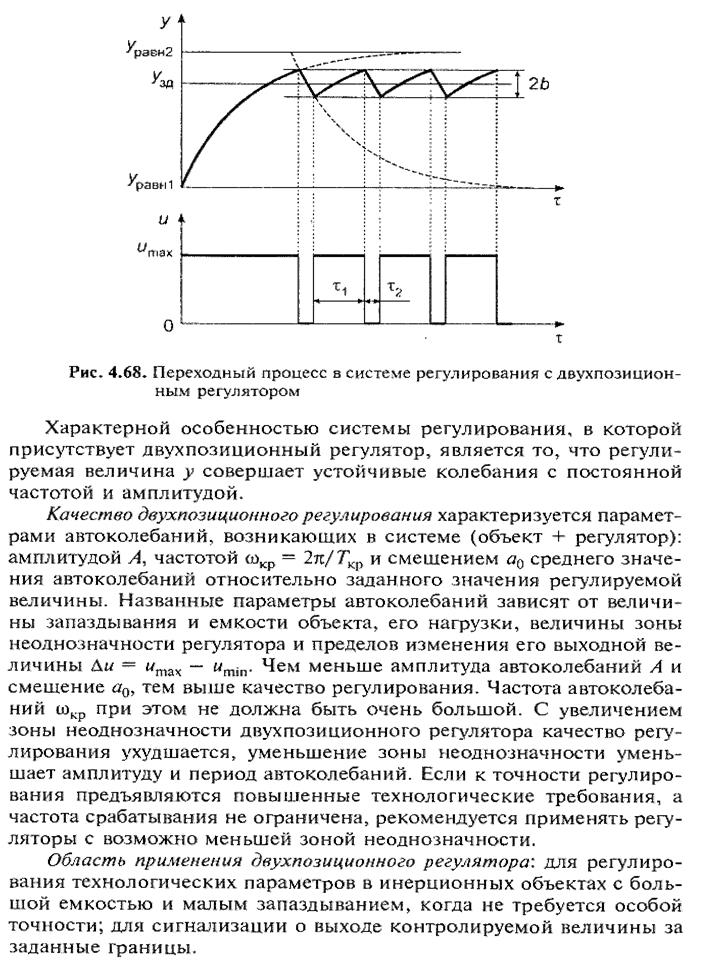
Принципиальная особенность функционирования систем управления с таким алгоритмом – возникновение особого режима работы системы: режима автоколебаний. Параметры автоколебаний (амплитуда и период) нелинейной системы зависят от свойств объекта и параметров нелинейной характеристики (Δ, μmax, μmin). В отличие от линейной системы, автоколебания характеризуют стационарный режим работы системы, а параметры автоколебаний не зависят от возмущающих воздействий.
 Параметры автоколебаний могут быть определены методом гармонической линеаризации (методом Гольдфарба), исследованием на фазовой плоскости, либо методом припасовывания (кусочно-линейной аппроксимации). Такие подходы используют аналитические или графические построения и позволяют получить параметры автоколебаний, являющиеся несколько завышенными по сравнению с реальными. Для приближенной оценки автоколебаний можно использовать метод Клюева А. С.
Параметры автоколебаний могут быть определены методом гармонической линеаризации (методом Гольдфарба), исследованием на фазовой плоскости, либо методом припасовывания (кусочно-линейной аппроксимации). Такие подходы используют аналитические или графические построения и позволяют получить параметры автоколебаний, являющиеся несколько завышенными по сравнению с реальными. Для приближенной оценки автоколебаний можно использовать метод Клюева А. С.
Рассмотрим процессы 2-х позиционного регулирования и особенности настройки регуляторов при отсутствии запаздывания в системе.
Пусть объект управления представляет собой интегрирующее звено.
 ..
..
Подадим на вход объекта управления ступенчатый сигнал амплитудой mm, тогда  рис. 3.40., где
рис. 3.40., где  .
.


|
|


В системе устанавливаются колебания с размахом  рис. 3.41.
рис. 3.41.
Отрезки времени t1 и t2, характеризующие состояние выходного сигнала реле одинаковы, при этом:  ,
,  ,
,  , Þ
, Þ  , амплитуда автоколебаний
, амплитуда автоколебаний  , а частота переключений реле
, а частота переключений реле  (Тк – период колебаний).
(Тк – период колебаний).
Если настройке уменьшать Δ↓, то Тк↓ и частота переключений nk↑.
Рассмотрим вариант работы схемы с несимметричной статической характеристикой нелинейного устройства (например, μmax = 2μmin). В этом случае
 ,
,  ,
,  ,
,  .
.
Процессы движения системы представлены на рис.3.42


Пусть объект обладает свойством самовыравнивания  , а разгонная характеристика имеет вид рис. 3.43
, а разгонная характеристика имеет вид рис. 3.43  .
.


При симметричной статической характеристике 2-х позиционного реле устанавливаются симметричные автоколебания постоянной амплитуды и частоты. При этом параметры автоколебаний в установившемся режиме могут быть определены следующим образом (примерно).


Размах колебаний  ,
,  , так как
, так как
 , то
, то  ,
,  .
.
Если  , то частота переключений реле
, то частота переключений реле  растет.
растет.
Рассмотрим поведение системы 2-х позиционного регулирования при наличии запаздывания. Запаздывание значительным образом влияет на параметры устанавливающихся колебаний системы.
Если передаточная функция объекта регулирования  ,
,
то  , а .
, а .




В результате устанавливаются симметричные колебания с периодом
 и размахом
и размахом  .
.
Если Δ=0, то  и
и  .
.
Если характеристика несимметричная, то возникает смещение средней линии установившихся колебаний. Такой эффект в автоколебаниях аналогичен появлению статической ошибки. Величина смещения определяется следующим образом  .
.
Аналогичные результаты можно получить, рассматривая объект с самовыравниванием.
Таким образом, в системах с запаздыванием при несимметричной характеристики реле наблюдается смещение средней линии автоколебаний. Такое смещение сравнительно легко вычислить, используя метод Клюева А.С., а при наладке системы учесть это смещение.
Если рассматривать ИМ постоянной скорости, то его структурная схема может быть представлена на рис. 3.7 и рис. 3.8.


Передаточная функция ИМ 
У электронных регуляторов с ИМ постоянной скорости структура исполнительного устройства имеет вид (рис. 3.9).
 В современных регуляторах функции поляризованного реле реализуют триггерные схемы. Особенность, которых при реализации промышленных регуляторов заключается, в необходимости достаточно длительное время находится в устойчивом состоянии.
В современных регуляторах функции поляризованного реле реализуют триггерные схемы. Особенность, которых при реализации промышленных регуляторов заключается, в необходимости достаточно длительное время находится в устойчивом состоянии.
Если управляющий сигнал формируется с применением широтно-импульсной модуляции (ШИМ), то реализуется режим движения ИМ постоянной скорости аналогичный движению ИМ со средней скоростью, пропорциональной входному сигналу.
Допустим на вход исполнительного устройства подается импульс длительностью tи, tп – длительность паузы, Тц – время цикла Тц = tи + tп, а TМ – время перемещения исполнительного устройства (механизма) из одного крайнего положения в другое (100%).


При наличии импульса управляющее воздействие изменяется с постоянной скоростью равной 100/ТМ, т.е. Dm=(100/TM)* tи. На рис. 3.11 tg(αM) определяется конструктивной скоростью ИМ. За время паузы управляющее устройство остается постоянным. Средняя скорость за время цикла будет равна m` = Dm/(tи + tп), или m` = (100/TM)* tи./(tи + tп), или m` = tg(αM)*(tи/Тц). Принципиальная особенность: максимальная скорость исполнительного устройства ограничена его конструктивной скоростью .
ШИМ достаточно прозрачно реализуется в цифровых контроллерах, где время цикла – системное время контроллера. В аналоговых регуляторах для реализации ШИМ необходимо, чтобы регулятор работал в скользящем режиме.
При рассмотрении работы реальных регуляторах в практических руководствах используют термин – «время удвоения». Эта характеристика ПИ-регулятора, численно равная значению постоянной времени интегрирования регулятора. Она определяется при стендовой настройке и поверке регулятора.
 (1)
(1)


Рассмотрим промежуток времени t’
 Þ
Þ  ,
,
т. е. время удвоения это реальное значение постоянной времени интегрирования регулятора.
 Пневматические регуляторы обычно строятся по схеме, где пропорциональная и интегральная составляющие алгоритма отрабатываются параллельно. В пропорциональной составляющей регулятора kп настраивается следующим образом
Пневматические регуляторы обычно строятся по схеме, где пропорциональная и интегральная составляющие алгоритма отрабатываются параллельно. В пропорциональной составляющей регулятора kп настраивается следующим образом  . Здесь δ – диапазон дросселирования. Передаточная функция регулятора принимает следующий вид
. Здесь δ – диапазон дросселирования. Передаточная функция регулятора принимает следующий вид
 . (2)
. (2)
Временные характеристики регуляторов при изменении коэффициента передачи ПИ – регулятора приведены на рис. 3.14 и 3.15.
(к формуле 1) (к формуле 2)
Для преобразования (2) в (1)
 ,
,
 .
.
Приведенные замечания связаны с реализацией аналоговых регуляторов как электрических, так и пневматических.
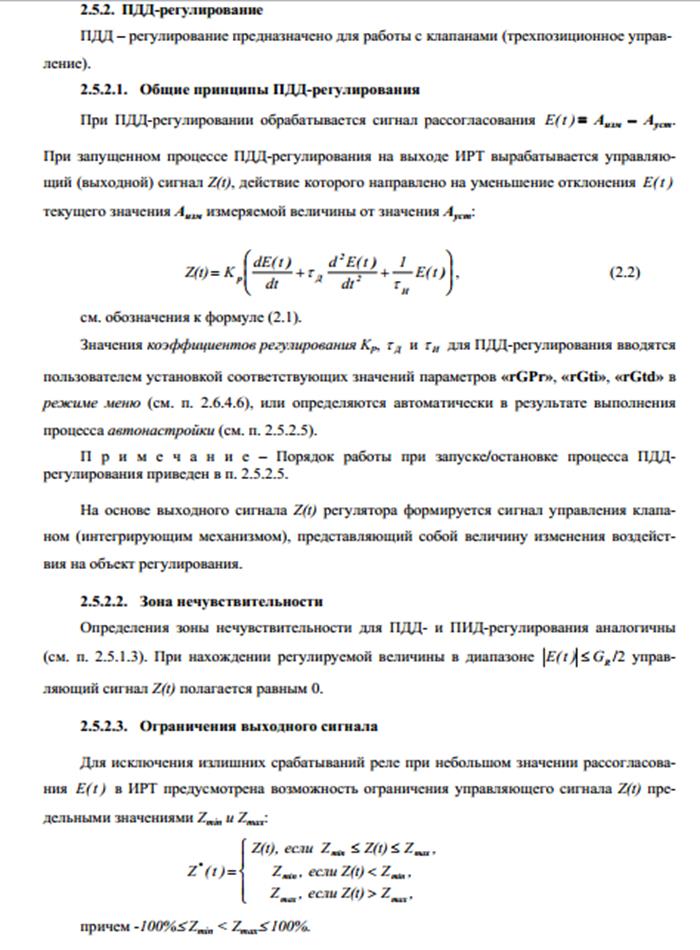
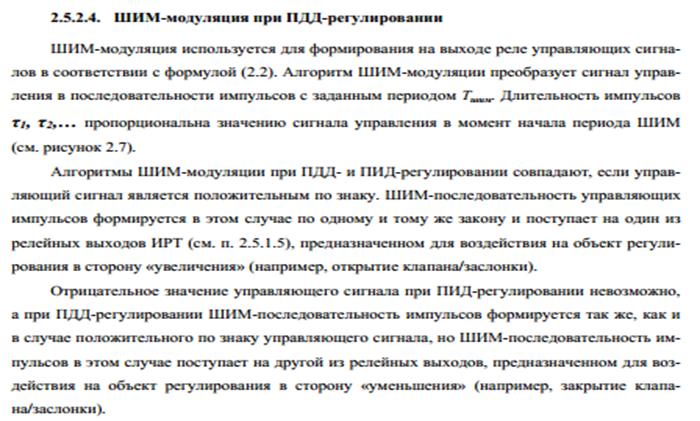
20. Закон регулирования ПДД.
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 2531; Нарушение авторских прав?; Мы поможем в написании вашей работы!