КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Організація робочого місця оператора. Робоче місце— це простір, в якому розташовані засоби відображення інформації, органи управління і допоміжне обладнан ня для виконання трудової діяльності
|
|
|
|
Робоче місце — це простір, в якому розташовані засоби відображення інформації, органи управління і допоміжне обладнан ня для виконання трудової діяльності оператора або групи опе раторів. Робоче місце — найменшацілісна одиниця виробництва, де наявні три основні складові: предмет праці, засоби діяльності і суб'єкт діяльності.
Конструктивні властивості технічних засобів діяльності слід узгоджувати з можливостями людини з урахуванням виконання нею робочих операцій у нормальних чи аварійних умовах. Цього можна досягти, враховуючи:
- антропологічні, біомеханічні, психофізіологічні і психо-
логічні властивості людини;
- санітарно - гігієнічні норми, вимоги і рекомендації;
- вимоги техніки безпеки;
- норми технічної естетики.
Специфіка робочих місць залежить від характеристик вирішуваних завдань і особливостей предметно - просторового оточення. Вона визначає:
- типи засобів управління виробничим процесом і особливості їхнього розміщення:
- типи засобів відображення інформації і органів управління, а також їх взаємне розташування;
- робоче положення тіла;
- необхідність у спецодязі і засобах індивідуальною захисту;
- режим праці та відпочинку;
- забезпечення необхідного простору для ремонту і налагодження обладнання;
- необхідність місця для спец оснащення, складування готової продукції.
Робочі місця можуть бути класифіковані за різними ознаками.
З-поміж основних функцій, які виконує людина в системі, розрізняють робочі місця; оперативного управління, інформаційно-довідкові, оператора ЕОМ, функціонально-технологічного контролю, керування рухомим об 'єктом, комбіновані.
Щодо кількості одночасно працюючих операторів робочі місця с Індивідуального і групового використання.
За характером робочих операцій, які виконує людина, вони поділяються па автоматизовані і механізовані.
За ступенем спеціалізації робочі місця можуть бути універсальними, спеціалізованими і спеціальними.
Залежно від положення тіла оператора у просторі під час трудової діяльності виділяють робочі місця для виконання робіт сидячи, стоячи, сидячи-стоячи і лежачи.
Конструкція робочого місця мас забезпечувати: можливість оператора швидко зайняти його, змінити положення тулуба і кінцівок, прийняти зручну позу для відпочинку; відсутність постійного контакту життєво важливих частин тіла з корпусом, механізмами та агрегатами об'єкта, можливість надання першої допомоги пораненим, їх евакуації, швидкого залишення об'єкта в аварійних ситуаціях.
Просторове компонування робочого місця, величина зусиль на органи управління, параметри кутів спостереження визначаються насамперед положенням тіла працюючого.
З точки зору біомеханіки положення тіла залежить від орієнтації його в просторі, а також від розмірів площі опори. Кожне з положень тіла характеризується певними умовами рівноваги, ступенем напруження м'язів, станом серцево-судинної і дихальної систем, розташуванням внутрішніх органів і, відповідно, витратами енергії,
Крім того, на вибір робочого положення впливають характер робочого навантаження та його значення, обсяг і темп робочих рухів, задана точність виконання операцій, особливості предметно-просторового оточення і площа функціональних приміщень.
Сам термін «робоча поза» позначає типове положення тіла у просторі при виконанні трудових операцій. Як правило, перевага надасться положенню оператора «сидячи», оскільки це вимагає меншого напруження різних груп м'язів і сприяє успішному перебігу процесів сприймання і переробки інформації (рис. 37). Основою такого автоматизованого робочого місця управління с пульт управління, який може мати різні форми (рис. 38).
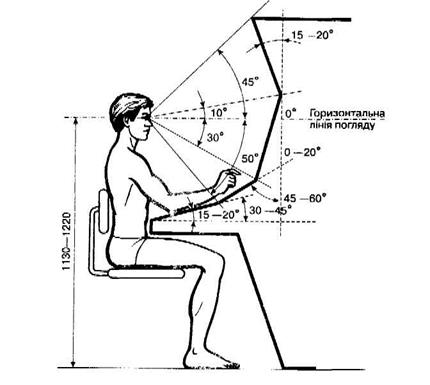
Рис 37
Фронтальна форма пульта (а) застосовується за можливості
Робоча поза «сидячи»
розташування всіх органів управління і засобів відображення інформації у відповідних зонах;
- ОУ — максимальної і допустимої зони досяжності;
- ЗВГ — в зонах центрального і периферійного поля зору.
Трапецієподібну (б) використовують тоді, коли не можливо ЗВІ і ОУ розташувати на пульті фронтальної форми. В цих випадках вони частково розміщуються на бокових панелях, які розгорнуті відносно фронтальної під кутом 90-120".
Багатогранну (в) застосовують за значної кількості ЗВІ і ОУ, при цьому мінімальний радіус досяжності становить 600 мм, а максимальний радіус спостереження за показниками приладів — 5000 мм,
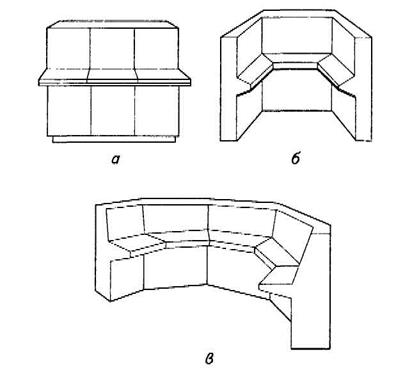
Р и с. 38
|
Форми пультів і панелей:
а — фронтальна, б — трапецієподібна; в — багатогранна
Головною проблемою при проектуванні пультів управління с розташування ЗВІ і ОУ, На рис, 39 наведені необхідні зони Для їхнього розміщення у положенні «сидячи» і «стоячи».
Підвищення точності і швидкості дій операторів передбачає розташування ЗВІ і ОУ з дотриманням принципів (рис. 40) функціональної відповідності, об'єднання, поєднання стимулу і реакції, послідовності дій, важливості і частоти використання.
Принцип функціональної відповідності (рис. 40, а) є актуальним, коли підсистеми СЛМ незалежні, автономні або дуже слабо пов'язані між собою, Згідно з цим принципом кожна підсистема СЛМ мак свою блок-панель на пульті
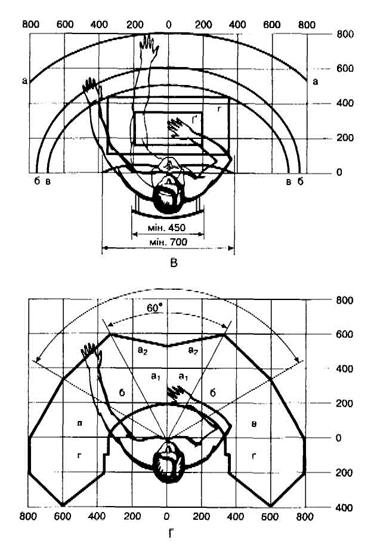

 Рис. 39
Рис. 39
Зони розміщення ЯВІ й органів управління на панелях пульта: А при роботі «сидячи», Б — при роботі «стоячи»; В — зони досяжності рук людини В горизонтальній площині (в положенні «сидячи»): а - зона максимальної досяжності; б - зона досяжності пальців при простягнутій руці; в — зона зручної досяжності долоні; г — оптимальний простір для простої ручної роботи; ґ — оптимальний простір для тонкої ручної роботи; Г зони розміщення індикаторів і органів управління в горизонтальній площині (а положенні «сидячи»): а, - для найважливіших і часто використовуваних органів управління і засобів відображення інформації; а} для найважливіших індикаторів; б — для нечасто використовуваних органів управління і засобів відображення інформації; п — для нечасто використовуваних органів управління; г для допоміжних органів управління поза межами досяжності і огляду із висхідної робочої пози
|
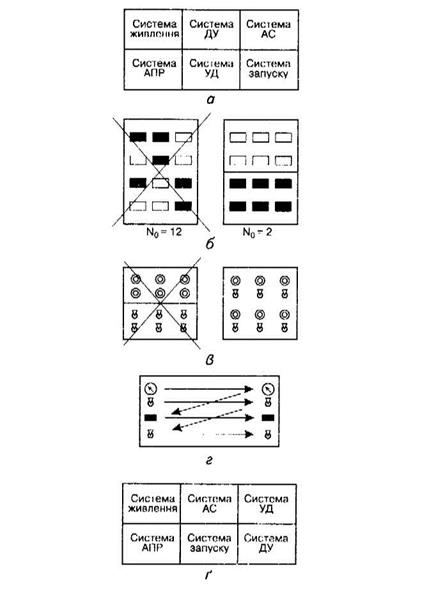
Р и с. 40
Принципи розташування ЗВІ й органів управління. Загальна оптимізація компонування пульта залежатиме від оптимізації кожної блок-панелі, для компонування якої можна послуговуватися іншими принципами розташування ЗН1 і ОУ,
Принцип об'єднання (рис, 40, б) вимагає застосування значної кількості однотипних елементні контролю і управління, які набувають одного й іоіо самого стану (положення) протягом певного часу і які поєднані в одну групу. Використання цього принципу сприяє значному зменшенню кількості інформації, що надходить до людини-оператора.
Принцип поєднання стимулу і реакції (рис. 40, в) просторово узагальнює елементи управління та індикації. Застосування цього принципу суттєво зменшує кількість варіантів вибору органу управління і відповідно інформаційне навантаження на оператора.
Принцип послідовності дій (рис. 40,) вимагає такого розташування елементів управління на пульті, яке б відповідало алгоритму діяльності оператора. При цьому необхідно враховувати стереотипи, які склалися в певного контингенту операторів (наприклад, для слов'янських народів — це стереотип читання текстів зліва направо, а для арабів чи японців — навпаки).
Принцип важливості і частоти використання (рис. 40, ґ) передбачає розміщення найважливіших індикаторів та органів управління, що найчастіше використовуються, в оптимальних робочих зонах. Цим забезпечується ефективна робота оператора за рахунок зниження його втомлюваності.
Розглянуті принципи розташування ЗВІ і ОУ можуть вступати у протиріччя між собою, тому в кожному конкретному випадку проектування пульта управління потрібно насамперед звертати увагу на особливості функціонування СЛМ.
Робоче сидіння є елементом робочого місця, яке забезпечує підтримку робочої пози оператора у положенні «сидячи».
Обираючи тип робочого сидіння, варто враховувати специфіку роботи, обсяг робочого простору, особливості інших елементів робочого місця, можливість зміни робочого положення, характер рухів різних частин тіла, наявність вібрації, умови безпеки.
Робочі сидіння повинні забезпечувати:
- підтримку такого положення тіла у просторі, за якого навантаження на м'язи буде мінімальним;
- умови для зміни робочої пози з мстою зняття статичної
напруги м'язів спини;
- нормальне функціонування організму людини;
- зручність розміщення у кріслі і вставання з нього;
- вільне переміщення тулуби і кінцівок тіла у процесі роботи;
- повільне або ступеневе регулювання параметрів, з кроком
для лінійних параметрів — 10 мм, а для кутових – Г.
Робочі стільці та крісла розраховані на довготривале використання, і тому до їхньої конструкції належать сидіння, спинка, підтримувальні конструкції, підлокітник і підголівник (для крісел), підставка для ніг.
Робочі крісла для транспортних засобів мають: високу спинку для забезпечення необхідної опори тіла в роботі з педалями; значний кут її нахилу (95'... 135").ч обов'язковим його регулюванням; ширше сидіння (450...800 мм); регулювання висоти сидіння, передньо - заднього його переміщення, антивібраційне обладнання. Основні параметри крісла оператора наведені на рис. 41.
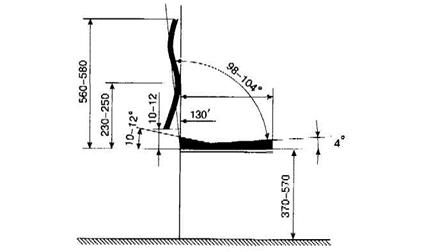
РИС 41
Розріз і розміри робочого крісла оператора
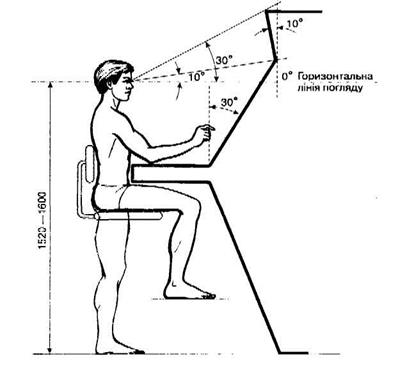
У проектуванні робочих місць, розрахованих на робочу позу «сидячи-стоячи» або «стоячи», необхідно враховувати і відповідні антропометричні і а психофізіологічні характеристики оператора. Розміщення панелей управління для роботи оператора, їхній нахил суттєво відрізняються під цих самих характеристик робочої пози «сидячи* (рис. 42).
Положення «стоячи* більше відповідає природному положенню тіла людини у просторі, хоча площа опори значно менша. В цьому положенні людина мас сприятливіші умови для візуального огляду, переміщення тіла у просторі, виконання перцептивно-моторних рухів. Але тривале перебування в цій позі викликає" підвищення тиску в судинах нижніх кінцівок, що призводить до розпитку різних патологічних захворювань.
|
|
|
|
|
Дата добавления: 2015-05-22; Просмотров: 560; Нарушение авторских прав?; Мы поможем в написании вашей работы!