- Р Р‡.МессенРТвЂВВВВВВВВжер
- ВКонтакте
- РћРТвЂВВВВВВВВнокласснРСвЂВВВВВВВВРєРСвЂВВВВВВВВ
- РњРѕР№ Р В Р’В Р РЋРЎв„ўР В Р’В Р РЋРІР‚ВВВВВВВВРЎР‚
- LiveJournal
КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приведение пространственной системы сил к данному центру
|
|
|
|
Полученные выше результаты позволяют решить задачу о приведении любой системы сил к данному центру. Эта задача, решается с помощью теоремы о параллельном переносе силы. Для переноса действующей на абсолютно твердое тело силы  из точки А (рис. 43, а) в точку О прикладываем в точке О силы
из точки А (рис. 43, а) в точку О прикладываем в точке О силы  = и
= и  = - . Тогда сила = окажется приложенной в точке О и к ней будет присоединена пара (, ) с моментом
= - . Тогда сила = окажется приложенной в точке О и к ней будет присоединена пара (, ) с моментом  , что можно показать еще так, как на рис. 43, б. При этом
, что можно показать еще так, как на рис. 43, б. При этом 
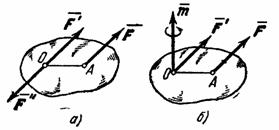
Рис.43
Рассмотрим теперь твердое тело, на которое действует какая угодно система сил  ,
,  ,…,
,…,  (рис. 44, а). Выберем произвольную точку О за центр приведения и перенесем все силы системы в этот центр, присоединяя при этом соответствующие пары. Тогда на тело будет действовать система сил
(рис. 44, а). Выберем произвольную точку О за центр приведения и перенесем все силы системы в этот центр, присоединяя при этом соответствующие пары. Тогда на тело будет действовать система сил
 = ,
= ,  = , …,
= , …,  = .
= .
приложенных в центре О, и система пар, моменты которых будут равны
 =
=  (),
(),  = (), …,
= (), …,  = (
= ( ),
),
Силы, приложенные в точке О, заменяются одной силой  , приложенной в той же точке. При этом
, приложенной в той же точке. При этом  или,
или,
 .
.
Чтобы сложить все полученные пары, надо геометрически сложить векторы моментов этих пар. В результате система пар заменится одной парой, момент которой  или,
или,
 .
.
Как и в случае плоской системы, величина , равная геометрической сумме всех сил, называется главным вектором системы; величина  , равная геометрической сумме моментов всех сил относительно центра О, называется главным моментом системы относительно этого центра.
, равная геометрической сумме моментов всех сил относительно центра О, называется главным моментом системы относительно этого центра.
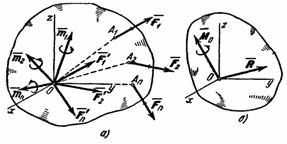
Рис.44
Таким образом мы доказали следующую теорему, любая система сил, действующих на абсолютно твердое тело, при приведении к произвольно взятому центру О заменяется одной силой , равной главному вектору системы и приложенной в центре приведения О, и одной парой с моментом , равным главному моменту системы относительно центра О (рис. 36, б).
Векторы и обычно определяют аналитически, т.е. по их проекциям на оси координат.
Выражения для R x, R y, R z нам известны. Проекции вектора на оси координат будем обозначать M x, M y, M z. По теореме о проекциях суммы векторов на ось будет  или,
или,  . Аналогично находятся величины M y и M z.
. Аналогично находятся величины M y и M z.
Окончательно для определения проекций главного вектора и главного момента получаем формулы:
|
|
|
Дата добавления: 2015-06-04; Просмотров: 456; Нарушение авторских прав?; Мы поможем в написании вашей работы!