КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Подсистема торможения колес
|
|
|
|
Работа
А. Режим "Руление" (Управление колесами от штурвальчика на угол 0-48°)
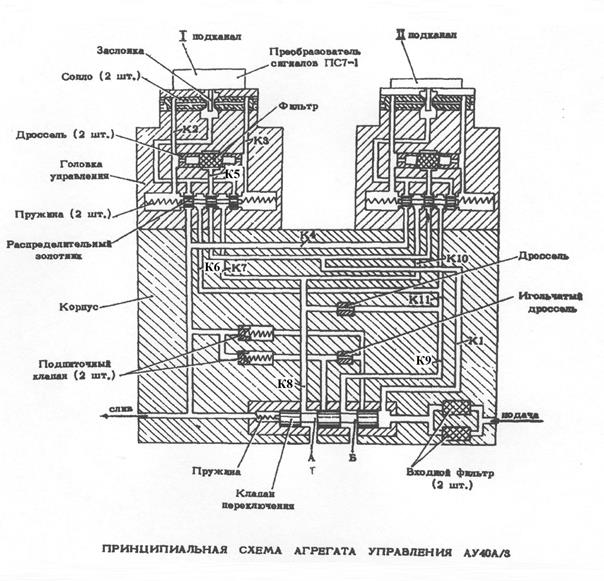
Для управления поворотом колес (при выпущенном положении опор) переключатель на ручке штурвала левого летчика устанавливается в положение "Штурв." Управляющий электросигнал поступает к клапанам переключения агрегатов управления АУ4ОА-3, они срабатывают и соединяют рабочие полости гидроцилиндров (8) поворота с окнами распределительных золотников АУ40А-3. Реле давления ГА135Т-О0-45 (4) замыкают цепь сигнализации. Система подготовлена для работы в режиме "Руление".
Командные сельсины-датчики блоков БСД-1 управления поворотом колес ПОШ на 48° через редукторы кинематически соединены со штурвальчиком, а следящие сельсины-приемники блоков БСП-1 через редукторы соединены со стойкой ПОШ. При повороте штурвальчика роторы сельсинов-датчиков поворачиваются и выходят из положения, согласованного с роторами сельсинов-приемников, создавая углы рассогласования. При этом в выходных однофазных обмотках сельсинов-приемников создаются переменные напряжения с амплитудами, пропорциональными углам рассогласования, и фазами, зависящими от знаков рассогласования. Напряжение с сельсинов-приемников подается в блоки усиления БУ2. Усиленные и выпрямленные сигналы управления подаются к головкам I или П канала агрегатов управления АУ40А-3 (5), в которых они преобразуются в перемещения управляющих золотников, и через открывающиеся окна жидкость поступает в рабочие полости гидроцилиндров (8). Поршни гидроцилиндров совершают ход, поворачивая колеса ПОШ в сторону уменьшения угла рассогласования. При этом тросовая проводка обратной связи поворачивает выходной вал блока сельсинов-приемников в сторону уменьшения рассогласования. Сигнал рассогласования уменьшается. Когда сигнал рассогласования станет меньше зоны нечувствительности системы, подача рабочей жидкости к исполнительному механизму прекращается, и колеса ПОШ перестают поворачиваться, отработав заданный летчиком угол.
Б. Режим "Взлет-Посадка" (управление поворотом колес от педалей на угол 0-7°)
Для управления поворотом колес (при выпущенном положении опоры) необходимо переключатель на ручке штурвала левого летчика установить в положение "Педали". Напряжение подается к электрогидравлическим кранам ГА184У (1) и к блокам усиления БУ2. Электрогидравлические краны срабатывают и открывают доступ рабочей жидкости в агрегаты управления АУ40А-3 (5) и реле давления ГА135Т-00-45 (4). Система подготовлена для работы в режиме "Взлет-Посадка". Далее система управления работает подобно режиму «Руление».
В. Режим "Свободное ориентирование"
При работе на данном режиме блоки сельсинов-датчиков БСД-1, сельсинов-приемников БСП-1, блоки усиления БУ2 и электрогидравлические краны ГА184У обесточены (переключатели на ручках штурвалов летчиков находятся в нейтральном положении). Линии питания агрегатов управления АУ40А-3 соединяются со сливом. Таким образом, доступ рабочей жидкости к агрегатам управления АУ4ОА-3 (5) закрыт. Клапаны переключения АУ4ОА-3 перемещаются с помощью пружин в положение, при котором рабочие полости гидроцилиндров (8) соединяются между собой через дроссели демпфирования режима "Свободного ориентирования", установленные в агрегатах АУ4ОА-3, что обеспечивает возможность устойчивых демпфированных разворотов внешними силами и моментами, действующими на колеса ПОШ.
Система управления поворотом самолета Суперджет. Существуют следующие режимы управления системой управления поворотом колес (СУПК) самолета:
-управление от педалей руля направления. Управление от педалей руля направления используется при разбеге и пробеге на скорости до 390 км/ч. В этом режиме поворот колес передней опоры осуществляется на угол ±7°;
-управление от рукоятки управления поворотом. Управление от рукоятки управления поворотом используется в начале разбега и в конце пробега на скорости от 0 до 80 км/ч. Рукоятки расположены на левом и правом боковых пультах. Максимальный угол поворота в режиме управления от рукоятки управления поворотом ±(65° ±З°);
-самоориентирование. В режиме самоориентирования колеса передней опоры устанавливаются в направлении вектора скорости самолета. В этом режиме СУПК обеспечивает демпфирование колебаний колес передней опоры. Переход в режим самоориентирования происходит:
- при отключении СУПК;
- при скорости движения самолета более 390 км/ч;
- в случае возникновения отказных ситуаций.
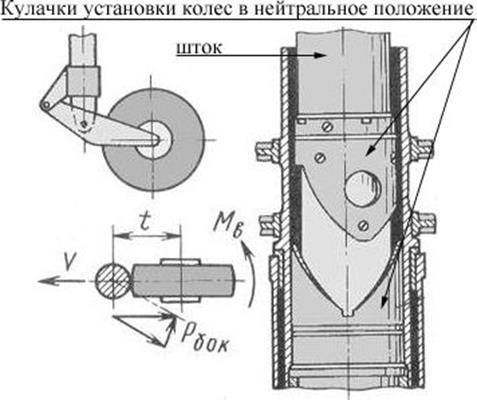
На взлете, после отрыва передней опоры, управление поворотом колес осуществляется еще в течение 4-х секунд. В это время СУПК выполняет установку колес передней опоры в нейтральное положение для обеспечения правильного положения передней опоры при уборке в нишу передней опоры шасси.
Система управления поворотом колес дистанционная, электрогидравлическая, следящая. Основными элементами СУПК являются:
— блок управления уборкой и выпуском и поворотом ПОШ (LGSCU),
— гидравлический агрегат управления поворотом,
— датчик угла поворота,
— датчик предельного угла поворота,
— органы управления СУПК.
Электрические управляющие сигналы формируются органами управления СУПК — педалями руля направления, рукоятками управления поворотом. Датчик угла поворота и датчик предельного угла поворота формируют следящие сигналы. В блок LGSCU поступают управляющие и следящие сигналы. Блок LGSCU обрабатывает сигналы в соответствии с алгоритмом управления поворотом и формирует сигналы, управляющие гидравлическим агрегатом управления поворотом. Гидравлический агрегат управления поворотом по управляющим сигналам обеспечивает подвод гидравлического питания в управляющие цилиндры. Управляющие цилиндры через реечный механизм передней опоры шасси поворачивают поворотную часть передней опоры шасси вместе с колесами.
На рис.4.36 приведена принципиальная схема гидравлического агрегата управления поворотом. Гидравлический агрегат управления поворотом крепится четырьмя болтам к проушинам корпуса стойки передней опоры. Гидравлический агрегат управления поворотом:
-преобразует сигналы управления в гидравлические расход и давление для перемещения реечного механизма;
-демпфирует боковые колебания передних колес в режиме самоориентирования ПОШ;
-поддерживает необходимое давление во внутренних полостях системы во время полета;
-выдает в блок LGSCU сигналы, пропорциональные давлению во внутренних полостях системы.
Гидравлический агрегат управления поворотом включает:
-входной фильтр в линии нагнетания, предназначенный для очистки рабочей жидкости;
-обратный клапан, предназначенный для предотвращения оттока рабочей жидкости из внутренних полостей модуля при отсутствии давления в гидросистеме №2;
-перекрывной электрогидроклапан, предназначенный для подачи рабочей жидкости под давлением от ГС2 к электрогидравлическому сервоклапану и закольцовки гидравлических полостей гидравлического агрегата управления поворотом;
-сигнализатор давления предназначен для выдачи электрического сигнала пропорционального давлению рабочей жидкости в гидравлическом агрегате управления поворотом в блок LGSCU;
-электрогидравлический сервоклапан направляет поток рабочей жидкости от ГС2 в левый (правый) управляющий цилиндр реечного механизма по сигналам блока LGSCU;
-односторонний дроссель предназначен для обеспечения одностороннего дросселирования рабочей жидкости при демпфировании колебаний колес передней опоры;
-антикавитационный клапан предназначен для препятствования возникновения разрывов в потоке рабочей жидкости и кавитации;
-перепускной клапан соединяет полость управляющего цилиндра с линией слива при давлении более 217 кгс/см2;
-компенсатор предназначен для поддержания постоянного давления 20 кгс/см2 внутри гидравлических каналов рулежного механизма и гидравлического агрегата управления поворотом, что обеспечивает его работоспособность при перепадах температуры.
Конструкция некоторых агрегатов




Основная тормозная система современного ЛА предназначена для дистанционного управления тормозами колес основных (в ряде случаев и передних) опор шасси путем изменения давления в гидроцилиндрах тормозов. Основная тормозная система обеспечивает:
-торможение самолета на послепосадочном пробеге, при прерванном взлете, при рулении и буксировке;
-торможение колес после взлета при уборке шасси;
-стартовое торможение;
-управление движением самолета на земле раздельным подтормаживанием колес левой или правой основной опоры шасси, совместно с системой управления поворотом колес ПОШ.
Система основного торможения современного ЛА – электрогидравлическая. Управление осуществляется дистанционно при помощи тормозных педалей обоих пилотов и дополнительных органов управления. Рассмотрим конструкцию и работу системы торможения на примере самолета Ил-76.
Система торможения самолета Ил-76. Тормозная система самолета - гидравлическая с электродистанционным управлением обеспечивает:
затормаживание колес основных опор шасси на пробеге, разбеге и рулении - основное торможение;
затормаживание колес основных опор шасси на стоянке и исполнительном старте - стояночное (стартовое) торможение;
подтормаживание колес передней и основной опор при его уборке.
Каждая основная опора шасси имеет четыре тормозных колеса, тормоза колес дисковые гидравлические. Передняя опора также имеет четыре колеса, при этом колеса, расположенные с одной стороны оси, представляют собой соединение двух колес различных сборок, между которыми установлен тормоз - гидроцилиндры подтормаживания колес при уборке шасси.
Система затормаживания колес основных опор (основное торможение, стояночное торможение, подтормаживание при уборке шасси) состоит из двух независимых и конструктивно подобных линий для передней и задней пар опор.
Основное торможение имеет самостоятельное управление тормозами с места левого и правого летчика от тормозных подножек, установленных на педалях руля направления. Тормоза колес обеспечиваются давлением от различных гидросистем самолета: тормоза колес передней пары основных опор - от гидросистемы №1, тормоза колес задней пары основных опор от гидросистемы №2. Линии независимы одна от другой - при выходе из строя одной из гидросистем соответствующие ей колеса не затормаживаются. В системе установлены два гидроаккумулятора, подключенные к линии нагнетания спойлеров гидросистем №1 и 2. От данных гидроаккумуляторов давление жидкости поступает и в линию стояночного торможения, а также подается давление в системы управления аварийным люком кормовой кабины и аварийного выпуска шасси и закрытия створок шасси.
Включенные в систему двухсигнальные и центробежные датчики автомата торможения сбрасывают давление из тормозов при возникновении углового замедления колес, превышающего допустимую величину (в момент, предшествующий юзу), а также при падении числа оборотов колес ниже допустимых пределов. При необходимости предусмотрено быстрое растормаживание всех колес передней или задней пары основных опор выключателями "Аварийное растормаживание колес", расположенными на центральном пульте летчиков.
На рис.4.37 изображена принципиальная схема торможения колес левой передней основной опоры шасси. Стояночное торможение питается от гидроаккумуляторов тормозов (2), включается электрогидравлическими кранами ГА185У/3 (6) при перекладке спаренных переключателей стояночного торможения (расположенных на центральном пульте летчиков) в положение "Заторможено". Система обеспечивает на стоянке давление в тормозах в заданных пределах в течение не менее 48 часов, а на исполнительном старте при заторможенных колесах основных опор удерживает от движения самолет при работе всех двигателей на взлетном режиме. Давление для подтормаживания колес при уборке шасси подается автоматически: для основных опор - по линии стояночного торможения от гидроаккумуляторов тормозов, для передней опоры - из линии уборки передней опоры, колеса находятся в подторможенном состоянии с начала до окончания цикла уборки.
Слив жидкости из тормозных цилиндров при растормаживании колес осуществляется в линии общего слива, либо в отдельные линии слива тормозов:
при сбросе давления автоматом торможения и при аварийном растормаживании колес (сброс давления электрогидравлическими кранами УЭ24/1-2 (10)) - в линию слива общей сети;
при сбросе давления тормозными подножками (электрогидравлическими редукционными клапанами КЭ26/1(8)) и при выключении стояночного торможения через редуктор (5) в линию слива тормозов (или через обратный клапан в линию общего слива).
На приборной доске летчиков и приборной доске старшего бортового техника расположены приборы контроля за давлением в тормозах и гидроаккумуляторах тормозов, лампы сигнализации наличия давления в тормозах.
Система обеспечивает управление затормаживанием колес правых и левых основных опор (одновременное или раздельное) от тормозных подножек левого и правого летчиков. Электродистанционное управление тормозами от левого и правого летчиков идентичны.
Линия стояночного торможения используется также для автоматического (через реле сети уборки шасси) подтормаживания колес при уборке шасси.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 3439; Нарушение авторских прав?; Мы поможем в написании вашей работы!