КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Следящий электропривод
|
|
|
|
Следящим называется электропривод, который обеспечивает с заданной точностью движение исполнительного органа рабочей машины в соответствии с произвольно изменяющимся сигналом управления. Этот сигнал управления может изменяться в широких пределах по произвольному временному закону и иметь как механическую, так и электрическую природу. Чаще всего входной сигнал представляет собой скорость или угол поворота оси или вала. Следящий электропривод применяется для антенн радиотелескопов и систем спутниковой связи, в копировальных станках, для привода исполнительных органов роботов и манипуляторов, в автоматических измерительных устройствах и во многих других случаях.
Структурная схема следящего электропривода представлена на рис. 6.13. Он состоит из датчиков 1 и 2 входного и выходного сигналов, измерителя рассогласования 3, системы управления 4 и электродвигателя с механической передачей 5, который приводит в движение исполнительный орган 6 в рабочей машине.

Датчики входной и выходной величин преобразуют механические величины (скорость или угол поворота вала) в электрические – входной сигнал U вх и сигнал обратной связи U о,с. Измеритель рассогласования 3, алгебраически суммируя эти сигналы, вырабатывает сигнал рассогласования U D, поступающий в систему управления электродвигателем 4. Следящий электропривод по своей структуре представляет собой замкнутую автоматическую систему.
Система управления 4 состоит из усилителя (регулятора) и силового преобразователя, которые обеспечивают необходимое преобразование сигнала рассогласования U D в напряжение U, поступающее на двигатель. За счет выбора схем усилителя (регулятора) и преобразователя или введения корректирующих устройств обеспечивается необходимый закон изменения этого напряжения во времени u (t).
Электродвигатель и механическая передача 5 в соответствии с законом изменения u (t) обеспечивают перемещение исполнительного органа 6. Иногда двигатель с механической передачей называют исполнительным механизмом (сервомеханизмом).
Классификация следящего электропривода может быть выполнена по нескольким признакам. Если следящий электропривод предназначен для воспроизведения с заданной точностью скорости движения исполнительного органа, то он называется скоростным, а если положения – то позиционным.
По виду характеристики системы управления 5 различают следящие электроприводы с непрерывным или прерывным управлением; последние, в свою очередь, делятся на релейные и импульсные.
Отличительной особенностью следящих электроприводов непрерывного действия является непрерывное управление электродвигателем, пропорциональное сигналу рассогласования.
Следящий электропривод релейного действия характеризуется тем, что напряжение на двигатель подается только в том случае, когда сигнал рассогласования достигает определенного значения. До этого значения сигнала рассогласования напряжение на двигатель не подается и он неподвижен. Поэтому релейный следящий электродвигатель имеет определенную зону нечувствительности.
Импульсный следящий электропривод отличается тем, что управляющее воздействие на электропривод подается в виде импульсов напряжения, амплитуда, частота или скважность которых изменяется в зависимости от сигнала рассогласования. В этих случаях говорят соответственно об амплитудно-, частотно- и широтно-импульсной модуляции сигнала управления.
В следящем электроприводе используются двигатели переменного и постоянного тока, различные виды усилителей (электромашинные, магнитные, полупроводниковые, пневматические, гидравлические), датчики скорости и положения.
а) Следящий электропривод постоянного тока непрерывного действия с ЭМУ
Схема следящего электропривода этого вида приведена на рис. 6.14. Двигатель постоянного тока независимого возбуждения М приводит в движение рабочую машину РМ через механическую передачу Р. Якорь двигателя М получает питание от электромашинного усилителя поперечного поля (ЭМУ), который в этой схеме выполняет функции силового преобразователя и одного из усилителей системы.
В качестве датчиков входной Qвх и выходной Qвых величин в данной схеме используются сельсины, работающие в трансформаторном режиме. Один из них, называемый сельсином-приемником СП, является датчиком выходной величины Qвых и устанавливается на валу редуктора Р. Другой сельсин, называемый сельсином-датчиком СД, преобразует входной сигнал Qвх в электрический. При показанном на схеме соединении обмоток статоров СД и СП и питании обмотки ротора СД однофазным напряжением переменного тока U в напряжение  на обмотке ротора СП будет пропорционально разности углов Qвх и Qвых, т. е.
на обмотке ротора СП будет пропорционально разности углов Qвх и Qвых, т. е.
 (6.9)
(6.9)
а фаза этого напряжения будет определяться знаком угла рассогласования Q.
Следовательно, в рассматриваемой схеме включения сельсины СД и СП позволяют выделить сигнал рассогласования т. е. выполняют одновременно функции измерителя рассогласования (элемент 3 на рис. 6.13) и датчиков входной и выходной величин.
Сигнал рассогласования переменного тока поступает на вход фазочувствительного усилителя У1, который усиливает его и преобразует в сигнал постоянного тока, полярность которого определяется фазой сигнала , т. е. знаком разности углов Qвх и Qвых. Далее этот сигнал, пройдя через корректирующее звено (резисторы R1, R2 и конденсатор С1), поступает на вход усилителя У2, который осуществляет дополнительное усиление сигнала рассогласования.
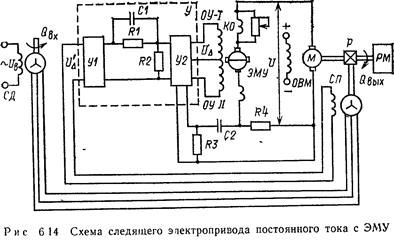
Выходное напряжение усилителя У2, представляющее собой результирующий сигнал управления следящего электропривода U D, подается на обмотки управления ЭМУ ОУ - I и ОУ - II, включенные по дифференциальной схеме с нулевой точкой. В результате такого включения магнитный поток ЭМУ определяется разностью МДС обмоток ОУ - I и ОУ - II, т. е. разностью токов, протекающих по этим обмоткам. Полярность напряжения U на выходе ЭМУ, подаваемого на якорь двигателя М определяется знаком (полярностью) сигнала U D.
Помимо корректирующего звена, состоящего из элементов R1, R2 и С1, в схеме используется дополнительное корректирующее звено, в состав которого входят резисторы R3, R4 и конденсатор С2. Эти корректирующие звенья обеспечивают требуемое качество регулирования выходных координат электропривода Qвых и  в динамических режимах его работы.
в динамических режимах его работы.
Работа следящего электропривода происходит следующим образом.
В исходном, согласованном положении Qвх=Qвых,  и двигатель М неподвижен. При изменении Qвх возникает угол рассогласования Q между положениями роторов сельсинов СП и СД и в соответствии с (6.9) на обмотке ротора СП появляется сигнал . В зависимости от фазы этого сигнала, которая определяется знаком разности
и двигатель М неподвижен. При изменении Qвх возникает угол рассогласования Q между положениями роторов сельсинов СП и СД и в соответствии с (6.9) на обмотке ротора СП появляется сигнал . В зависимости от фазы этого сигнала, которая определяется знаком разности  , на двигатель М будет подано напряжение U такой полярности, при которой вращение двигателя и исполнительного органа рабочей машины РМ будет происходить в направлении, уменьшающем угол рассогласования Q. При достижении углом рассогласования Q нулевого значения и постоянстве Qвх двигатель М отключается и вновь будет находиться в неподвижном состоянии. Таким образом, следящий электропривод работает только при возникновении угла рассогласования между осями датчика и приводного двигателя (исполнительного органа рабочей машины). Процесс работы следящего электропривода сводится к непрерывному автоматическому устранению возникающего рассогласования.
, на двигатель М будет подано напряжение U такой полярности, при которой вращение двигателя и исполнительного органа рабочей машины РМ будет происходить в направлении, уменьшающем угол рассогласования Q. При достижении углом рассогласования Q нулевого значения и постоянстве Qвх двигатель М отключается и вновь будет находиться в неподвижном состоянии. Таким образом, следящий электропривод работает только при возникновении угла рассогласования между осями датчика и приводного двигателя (исполнительного органа рабочей машины). Процесс работы следящего электропривода сводится к непрерывному автоматическому устранению возникающего рассогласования.
Рассматриваемый следящий электропривод с ЭМУ применяется на мощности от нескольких ватт до десятков киловатт. Он отличается высокой перегрузочной способностью, не вносит искажения в форму питающего напряжения, а при торможении двигателя обеспечивает рекуперацию энергии в сеть. Переход из режима двигателя в режим генератора обеспечивается естественными характеристиками электрических машин и происходит без резких изменений момента двигателя, что имеет большое значение для получения требуемых точности и плавности работы следящего электропривода.
Вместе с тем следящий электропривод, в котором используются электромашинные преобразователи и усилители, характеризуется существенными недостатками. Это относительно невысокое быстродействие, значительные массы и габариты силовой части электропривода, невысокий КПД (0,5–0,6), значительный уровень шума за счет вращающихся частей электромашинного агрегата.
В связи со сказанным в современных системах следящего электропривода обычно используются статические полупроводниковые усилители и преобразователи, применение которых позволяет устранить большинство из отмеченных недостатков, свойственных электромашинным преобразователям.
б) Следящий электропривод постоянного тока с тиристорным преобразователем
Схема следящего электропривода с ДПТ, якорь которого питается от реверсивного ТП, приведена на рис. 6.15.
Особенностью данного электропривода является применение измерительной схемы на основе двух синусно-косинусных вращающихся трансформаторов (СКВТ). Один из них – СKВТ-Д является датчиком входного сигнала Qвх, а другой – СКВТ-П – датчиком выходной величины Qвых. СКВТ имеет на статоре и роторе по две взаимно перпендикулярно расположенные в пространстве обмотки, схема соединения которых видна из рисунка. При повороте ротора СKВТ - Д в обмотках ротора наводится переменная ЭДС, амплитуда которой пропорциональна  одной обмотке и
одной обмотке и  – в другой. В остальном принцип измерения угла рассогласования 6=6вх–6вых и выделения сигнала рассогласования Уд е=о такой же, что и в случае применения сельсинов, однако СКВТ обеспечивают большую точность.
– в другой. В остальном принцип измерения угла рассогласования 6=6вх–6вых и выделения сигнала рассогласования Уд е=о такой же, что и в случае применения сельсинов, однако СКВТ обеспечивают большую точность.
|
|
|
|
|
Дата добавления: 2015-06-29; Просмотров: 8413; Нарушение авторских прав?; Мы поможем в написании вашей работы!