КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Агрегатно-модульный принцип построения промышленного робота (ПР). Конструкция ПР
|
|
|
|
Принцип построения ПР – агрегатно-модульный, т.е. ПР состоит из набора модулей, различные комбинации которых дают возможность компоновать манипулятор, обеспечивающий решение поставленной технологической задачи. Входящие в набор "руки" (выдвижная, локтевая двухшарнирная, локтевая трехшарнирная), механизмы (поворота, подъема, качания, ориентировки), каретка, монорельс, столы (тактовый и крестовый), захватное устройство позволяют получить варианты компоновок манипуляторов промышленных роботов.
Под модулем понимают универсальный агрегатный узел, обладающий функциональной полнотой и конструктивной завершенностью. Модули ПР должны удовлетворять требованиям прочности и жесткости, обеспечивать взаимную стыковку в различных сочетаниях и положениях, простой и надежный монтаж.
Преимущества: модульное устройство дает возможность формировать промышленные роботы, не имеющих избыточных возможностей и наиболее полно отвечающие конкретным технологическим процессам, специфике и возможностям производства.
Недостатки: отказ в некоторых случаях от более выгодных конструктивных решений в пользу менее выгодных, но соответствующих принципу агрегатного построения; увеличение габаритов и массы конструкции; увеличение числа стыков, что повышает трудоемкость сборки роботов, снижает жесткость и точность.
Конструкция. ПР состоит из манипулятора и устройства управления.
Манипулятор ПР предназначен для выполнения двигательных функций при перемещении объектов в пространстве и представляет собой многозвенный механизм с разомкнутой кинематической цепью.
Конструктивно манипулятор состоит из несущих конструкций, исполнительных механизмов, захватного устройства, привода с передаточными механизмами и устройства передвижения. Захватное устройство – конечный узел манипулятора, обеспечивающий захватывание и удержание в определённом положении объекта манипулирования. Захватные устр-ва в холодной штамповке – вакуумные, электромагнитные – реже – механические. В горячей штамповке – преимущественно механические.
|
|
|
Несущие конструкции служат для размещения всех устройств и агрегатов ПР, а также для обеспечения необходимой прочности и жесткости манипулятора. Несущие конструкции выполняют в виде оснований, корпусов, стоек, рам, тележек, порталов и т. п. Исполнительный механизм – это совокупность подвижно соединённых звеньев манипулятора, предназначенных для воздействия на объект манипулирования или обрабатываемую среду. Приводпредназначен для преобразования подводимой энергии в механическое движение звеньев исполнительного механизма в соответствии с сигналами, поступающими с устройства управления. Устройство передвижения служит для перемещения манипулятора или ПР в целом в необходимое место рабочего пространства и конструк-тивно состоит из ходовой части и приводных устройств.
Устройство управления ПР необходимо для формирования и выдачи управляющих воздействий манипулятору в соответствии с управляющей программой и конструктивно состоит из собственно системы управления, информационно-измерительной системы с устройствами обратной связи и системы связи. Обычно выполняется в виде отдельно стоящего пульта или в одном корпусе робота. Устройства управления ПР разделяются на программные, адаптивные и интеллектные. Наибольшее распространение получили программные, которые характеризуются тем, что они функционируют по жестко заданной программе.
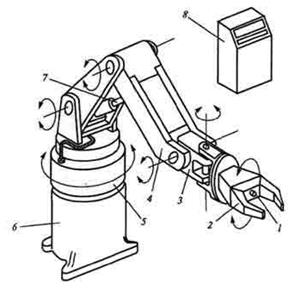
Рис. 1 Конструкция промышленного робота:1 - датчик обратной связи; 2 — захватное устройство; 3 — кисть; 4 —рука манипулятора; 5 — колонна; 6 — несущая конструкция (основание); 7 - привод руки; 8 - блок управляющего устройства с пультом.
|
|
|
|
|
Дата добавления: 2015-07-02; Просмотров: 2674; Нарушение авторских прав?; Мы поможем в написании вашей работы!