КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Требования к захватам ПР
|
|
|
|
Захватные устройства ПР. Классификация ЗУ.
В связи с тем, что штампуемые детали имеют различную форму и размеры, захватные устройства являются сменными элементами ПР. Манипуляторы ПР комплектуют набором типовых (для данной модели) захватных устройств. Иногда на типовой захват устанавливают сменные рабочие элементы (губки, присоски и т.п.).
Обязательные требования к захватам ПР:
- надёжность захватывания и удержания заготовки;
- стабильность базирования;
- недопустимость повреждения или разрушения объекта манипулирования;
- высокая прочность при малых размерах и массе;
- высокая надёжность крепления захватного устройства к руке.
В условиях серийного производства к захватным устройствам предъявляются дополнительные требования:
- широкозахватность (возможность захватывания и базирования деталей в широком диапазоне размеров, массы и формы);
- возможность захватывания близко расположенных деталей;
- лёгкость и быстрота замены (вплоть до автоматической).
В ряде случаев необходимо автоматически изменять усилие удержания детали в зависимости, например, от ее массы.
Для получения информации о взятии и об установке детали, об усилии сжимания, о температуре, скорости перемещения детали или положении захвата относительно заготовки захватные устройства снабжают датчиками, устанавливаемыми непосредственно на захватах (тактильными, фотоэлектрическими и др.).
В зависимости от принципа действия захватные устройства делятся на:
- механические,
- вакуумные,
- магнитные,
- с эластичными камерами (упругие оболочковые).
Механические захватные устройства можно разделить на:
- схватывающие и удерживающие, которые включают в себя приводное устройство и захватывающие элементы (наиболее распространены). Захват и удержание осуществляется за счет сил трения или за счет сил трения +удержив. усилие.
- поддерживающие, в которых для удержания детали используют нижнюю поверхность, выступающие части детали, а также имеющиеся в ней отверстия (крюки, петли, вилки, лопатки и т.д.).
Для изготовления губок применяют сталь или в случае особых требований к качеству поверхности детали – из полимерных материалов.
Конфигурация губок должна соответствовать форме детали в месте захвата.
Привод губок захватов преимущественно от индивидуальных пневматических или гидравлических цилиндров.
Захватные органы с эластичной камерой (рис.1) удерживают заготовку под действием внутреннего давления воздуха (или масла), деформирующего оболочку. При подаче сжатого воздуха в полость упругой оболочки 2, выполненной из армированной резины, происходит увеличение объёма полости и надёжное удерживание изделия 1. В то же время сводится к минимуму возможность нарушения его конфигурации.
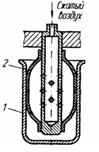
Рис.1 Захват с эластичной камерой
Электромагнитные захваты- широко применяются благодаря простоте конструктивного исполнения, большой удельной силе притяжения, быстрому срабатыванию и удобству управления ими. Посредством магнитных сил можно удерживать во время перемещения как мелкие ферримагнитные изделия, так и крупные изделия весом до нескольких тонн. Недостатки таких захватов заключаются в возможности их применения только для изделий, выполненных из ферримагнитных материалов, а также в том, что на контактирующей поверхности изделий может наводиться остаточный магнетизм. Кроме этого возникающее рассеянное магнитное поле затрудняет поштучное взятие такими захватами из стопы листовых деталей с малой толщиной и относительно большой поверхностью.
Простейший управляемый электромагнитный захват состоит из корпуса 1 (рис.2), катушки возбуждения 2 и сердечника 3.
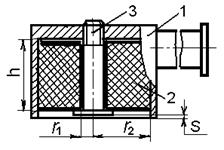
Рис.2. Электромагнитный захват: 1- корпус, 2 - катушка возбуждения, 3 - сердечник
Вакуумные захваты
Пневматические захваты удерживают перемещаемые изделия за счет создания разряжения (вакуума) в контактирующем с их поверхностью звене или за счет энергии воздействия потоков сжатого воздуха.
По способу создания перепада давлений вакуумные захваты подразделяются на пассивные (не управляемые) и активные (управляемые). В пассивных захватах разрежение создается за счет изменения объема внутренней полости присоски путем упругой деформации эластичного корпуса или оснащением ее растягивающейся мембраной, сильфоном, перемещающимся внутри поршнем. Схема работы не управляемого вакуумного захвата приведена на рис.3. При нажатии на заготовку 4 резиновый присос 1 начинает деформироваться и воздух, находящийся в полости А, вытесняется через открывающийся клапан 2 в периферийную часть присоса в атмосферу. При подъеме захвата клапан закрывается и в полости А создается вакуум из-за увеличения ее объема. Для освобождения заготовки необходимо поднять клапан 2 с помощью электромагнита 3.
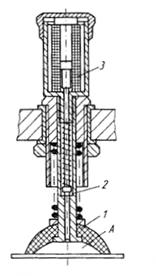
Рис 3. Схема работы не управляемого вакуумного захвата: 1 – присос, 2 – клапан, 3 – электромагнит
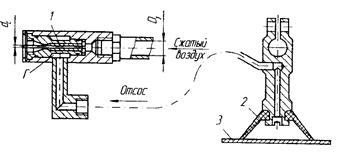
Рис 4. Схема работы вакуумного захвата с эжектором: 1 – сопло эжектора, 2 – присос, 3 - заготовка
|
|
|
|
|
Дата добавления: 2015-07-02; Просмотров: 1371; Нарушение авторских прав?; Мы поможем в написании вашей работы!