КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Уравнения Лагранжа второго рода
|
|
|
|
Уравнения Лагранжа второго рода предназначены для составления дифференциальных уравнений движения голономных систем довольно общего вида. Если кинетическая и потенциальная энергии системы определены и выражены через обобщенные координаты, то последующие выкладки в уравнениях Лагранжа доведены до автоматизма. Важное достоинство получаемых таким образом уравнений – они не содержат реакций связей (к тому же неизвестных). Но если возникает необходимость определения таких реакций, то метод Лагранжа (путем введения так называемых избыточных координат) позволяет решать и эту задачу.
Будем исходить из общего уравнения динамики:

| (9.21) |
Возьмем систему с идеальными стационарными связями (уравнения Лагранжа не меняют своей формы и при нестационарных связях), и пусть  - обобщенные координаты системы. Тогда радиус – вектор каждой точки может быть выражен через обобщенные координаты:
- обобщенные координаты системы. Тогда радиус – вектор каждой точки может быть выражен через обобщенные координаты:
| (9.22) |
Отсюда находим формулы для вычисления скорости:
| (9.23) |
и возможного перемещения:
| (9.24) |
Нетрудно убедиться в таких тождествах:
| (9.25) |
Подставляя (9.24) в (9.21), получим:

| (9.26) |
Здесь  - обобщенная сила (как уже известно, из аналитической статики), соответствующая обобщенной координате
- обобщенная сила (как уже известно, из аналитической статики), соответствующая обобщенной координате  .
.
С помощью (9.25) доказывается, что:
 ,
,
где Т – кинетическая энергия системы.
В результате уравнение (9.21) принимает вид:
| (9.27) |
Это уравнение называют общим уравнением динамики в обобщенных координатах. Все вариации в данном уравнении независимы, их можно сообщать поочередно, а потому, как нетрудно видеть, выражения в скобках будут нулями.
Мы приходим, таким образом, к уравнениям Лагранжа второго рода:
| (9.28) |
При движении системы в потенциальном силовом поле обобщенные силы выражаются через потенциальную энергию, и уравнения (9.28) принимают вид:
| (9.29) |
В этом случае их можно представить также в такой компактной форме:
| (9.30) |
где L = T-M – функция Лагранжа (кинетический потенциал).
Замечание. Обобщенную координату называют циклической, если она не входит явно в функцию L Лагранжа. Нециклические координаты называют позиционными.
Пусть – циклическая координата. Для циклических координат уравнения (9.30) принимают вид:

| (9.31) |
Отсюда следует:

| (9.32) |
Данные интегралы называют циклическими. Они представляют собой обобщение законов сохранения количества движения и кинетического момента системы.
Примеры.
1. Механическая система состоит из малой и большой призм с массами m и M. Малая скользит по боковой грани большой призмы, которая, в свою очередь, движется по гладкой горизонтальной плоскости под действием заданной силы  . Составить дифференциальные уравнения движения системы. Угол α наклона грани задан.
. Составить дифференциальные уравнения движения системы. Угол α наклона грани задан.
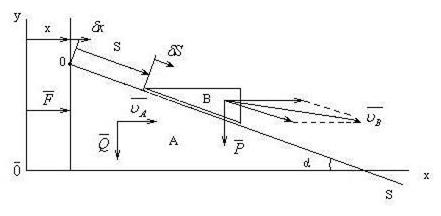
рис. 43.
Применим уравнения Лагранжа в форме (9.28). Рассматриваемая система имеет две степени свободы. За обобщенные координаты примем: х – абсолютное перемещение призмы А; S – относительное перемещение призмы В. Следует раскрыть уравнения:

| (1) |
Замечая, что кинетическая энергия не зависит от координат, а, следовательно,
 ,
,
находим левые части уравнений (1):

| (2) |
Обобщенные силы найдем из выражения элементарной работы, сообщая поочередно элементарные перемещения  и
и  . Остановим мысленно призму B на грани призмы A и сообщим всей системе (как твердому телу) перемещение . Получим выражение для элементарной работы
. Остановим мысленно призму B на грани призмы A и сообщим всей системе (как твердому телу) перемещение . Получим выражение для элементарной работы  . Отсюда следует
. Отсюда следует  . Далее, при остановленной призме А сообщим перемещение малой призме. Получим
. Далее, при остановленной призме А сообщим перемещение малой призме. Получим  . Отсюда следует
. Отсюда следует  .
.
Подставляя (2) и выражения для обобщенных сил в (1), получим дифференциальные уравнения движения системы:
2. Составить дифференциальные уравнения колебаний двойного математического маятника. Маятник состоит из двух материальных точек M1 и M2 веса  и
и  , прикрепленных к концам двух невесомых стержней. Первый стержень может вращаться вокруг неподвижной горизонтальной оси O, а второй – вокруг оси, связанной с точкой M1.
, прикрепленных к концам двух невесомых стержней. Первый стержень может вращаться вокруг неподвижной горизонтальной оси O, а второй – вокруг оси, связанной с точкой M1.
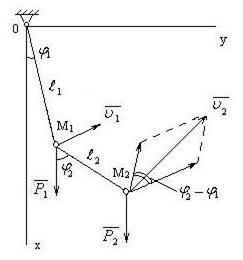
рис. 44.
Система имеет две степени свободы. За обобщенные координаты примем углы  и
и  отклонения стержней от вертикали. Для решения задачи воспользуемся уравнениями Лагранжа в форме (9.29). В нашем случае они запишутся так:
отклонения стержней от вертикали. Для решения задачи воспользуемся уравнениями Лагранжа в форме (9.29). В нашем случае они запишутся так:

| (1) |
Кинетическая энергия системы равна:

| (2) |
При составлении выражения потенциальной энергии сил тяжести иногда возникает вопрос о том, в какой точке, на каком уровне принять нулевое значение П. От этого зависит внешняя форма выражения. Но здесь играет роль не П, а  . Производная же во всех случаях будет одной и той же.
. Производная же во всех случаях будет одной и той же.
В рассматриваемой задаче представляется естественным принять П=0 для каждой точки, когда они находятся на оси Ох (в положении равновесия). Если из отклоненного положения возвращать систему на ось Ох, работа сил тяжести будет величиной положительной. А потому:

| (3) |
Далее вопрос сводится к вычислению производных. Остановимся на координате . Имеем:
Совершенно аналогично – для координаты .
Окончательную систему запишем в виде:

22.5 Принцип Гамильтона – Остроградского
Данный принцип касается в первую очередь, скажем так, философии механического движения. Сущность вопроса состоит в следующем. Представим себе движущуюся механическую систему. Поставим ей в соответствие наглядный геометрический образ – некоторую условную точку, которую назовем изображающей точкой. Это позволяет ввести понятие о траектории изображающей точки (рис. 45). Возьмем на траектории положения A0 и A1, соответствующие моментам времени t0 и t1. При заданных силах и характере связей можно представить множество путей перехода системы из A0 в A1 за время t1 - t0. Спрашивается, какой путь выбирает система? Или иначе, какой путь является истинным? Принцип Гамильтона – Остроградского дает ответ на этот вопрос.
Рис. 45
Вернемся к общему уравнению динамики:
 . .
| (9.33) |
Отделим работы сил активных от работы сил инерции и проинтегрируем равенство по времени в пределах от t0 до t1:
 . .
| (9.34) |
Допустим, что система движется в потенциальном силовом поле. В этом случае элементарная работа сил выражается особенно просто:
Доказывается также, что  .
.
Таким образом, равенство (9.34) приводится к виду:
 , ,
| (9.35) |
где L = T – П – кинетический потенциал.
Интеграл  называют действием по Гамильтону.
называют действием по Гамильтону.
Окончательно, принцип Гамильтона – Остроградского:

| (9.36) |
Принцип утверждает: действие по Гамильтону S имеет стационарное значение на истинном пути системы, если к сравнению с ним привлекается многообразие окольных путей, совпадающих с истинным в начальный и конечный моменты времени t0 и t1.
Если интервал времени t1 - t0 достаточно мал, действие S имеет минимум. [Четаев].
|
|
|
|
|
Дата добавления: 2015-06-27; Просмотров: 2100; Нарушение авторских прав?; Мы поможем в написании вашей работы!