КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Колебания без затухания
|
|
|
|
Свободные колебания систем с одной степенью свободы.
Элементов
Жесткость системы при последовательном соединении упругих
При последовательном соединении пружин (рис. 12.5) на каждую из них действует вес груза Q. Очевидно, что:
 ,
,
или, в соответствии с формулой (12.1):
 ;
;  .
.
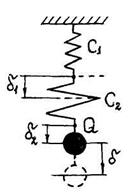
Рисунок 12.5
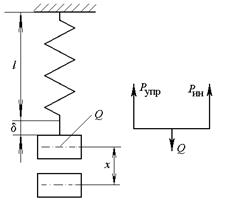
Рисунок 12.6
Окончательно имеем:
 .
.
Таким образом, при последовательном соединении упругих элементов величина, обратная жесткости системы, равна сумме величин, обратных жесткости упругих элементов, ее составляющих.
В данном случае и в дальнейшем ограничимся рассмотрением таких колебаний, для которых справедлив закон Гука и принцип независимости действия сил.
Рассмотрим простейшую систему, состоящую из груза, подвешенного на вертикально расположенной пружине (рис. 12.6). Влиянием собственного веса пружин пренебрегаем. Направим ось x вдоль оси пружины вниз.
За начало отсчета 0 возьмем положение статического равновесия груза Q.
В этом положении пружина растянута на величину d = Q / C, где С - жесткость пружины. Рассмотрим движение груза в произвольный момент времени t. Отклонение центра массы груза в этот момент от положения статического равновесия вниз обозначим через х. Получаем:
 ;
;  ;
;  .
.
При составлении уравнения движения будем исходить из принципа Даламбера, который заключается в том, что к движущейся с ускорением системе применимы соотношения статики при условии, что в число внешних сил включена фиктивная сила инерции, равная произведению массы на ускорение и направленная против ускорения. Полагаем, что скорость dx / dt и ускорение d 2 x / dt 2 совпадают по направлению с отклонением X. При отклонении груза возникает упругая сила Р упр которая стремится вернуть груз в состояние равновесия и потому называется восстанавливающей силой.
Дифференциальное уравнение колебаний получим, спроектировав все действующие силы на вертикальную ось:
 .
.
Отсюда имеем:
 , (12.3)
, (12.3)
Или
 , (12.4)
, (12.4)
где  .
.
Решением уравнения (12.3) будет:
 . (12.5)
. (12.5)
где А и В - постоянные интегрирования, зависящие от начальных условий, т.е. от положения груза m = Q / g и его скорости dx / dt в момент времени t = 0.
Если заданы начальная координата груза х 0 и начальная скорость u0, то из (12.5) определим:
 ;
;  .
.
Полагая
 и
и  , (12.6)
, (12.6)
решение (12.5) можно представить в виде:
 . (12.7)
. (12.7)
или
 ,
,
где l - амплитуда колебаний, определяемая формулой:
 .
.
Величина w0 t + y называется фазой колебаний, а величина y - сдвигом фазы. На основании (12.7) y может быть определена из условия tgy = х 0×w0/u0.
Уравнение (12.7) выражает процесс чисто периодического собственного колебания системы. График его представлен на рис. 12.7.
Период колебаний Т определяется из условия, что при увеличении времени t на величину Т аргумент, стоящий под знаком синуса, изменится на 2p:
 .
.
Период представляет собой время, в течение которого совершается одно колебание. Если Т - время одного колебания, то в 2p секунд будет происходить w0 колебаний. Поэтому величина w0 и носит название круговой частоты (в отличие от секундной частоты f = 1/ Т):
 .
.
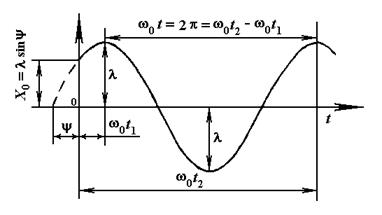
Рисунок 12.7
Круговую частоту часто называют частотой собственных колебаний системы, поскольку она, как это видно из (12.4), зависит не от начальных обстоятельств колебательного процесса, а от величины колеблющейся массы и жесткости системы. Формуле (12.4) можно придать вид:
 , (12.8)
, (12.8)
где g - ускорение свободного падения, м/с2; dс - статическое удлинение пружины под действием груза Q.
|
|
|
|
|
Дата добавления: 2015-06-28; Просмотров: 791; Нарушение авторских прав?; Мы поможем в написании вашей работы!