КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Розрахунок і розробка кінематичної схеми вальцевої дробарки
|
|
|
|
Основним завданням приводу є здійснення необхідних рухів при виконанні робочого процесу. Крім того привід повинен забезпечувати необхідні допоміжні
| Змн. |
| Лист |
| № докум. |
| Підпис |
| Дата |
| Лист |
| ДП 1886/11.04.00.000 ПЗ |
Найбільш простою структура приводу буде в тому випадку коли двигун безпосередньо зв’язаний з робочим органом. В більшості випадків привід повинен мати ланки для узгодження швидкості двигуна та робочих ланок машини. Для приводу з обертовим головним рухом робочого органу це можуть бути зубчасті та пасові передачі і різні тягові пристрої.
| Змн. |
| Лист |
| № докум. |
| Підпис |
| Дата |
| Лист |
| ДП 1886/11.04.00.000 ПЗ |
 =900 об/хв:
=900 об/хв:
Частота обертання повільно обертаючого валка  :
:
З врахуванням потужності електроприводу, яку потрібно для проведення подрібнення. Знайдемо необхідну потужність електродвигуна.
Привід від електродвигуна через клинопасову передачу передається на швидкообертовий валок.
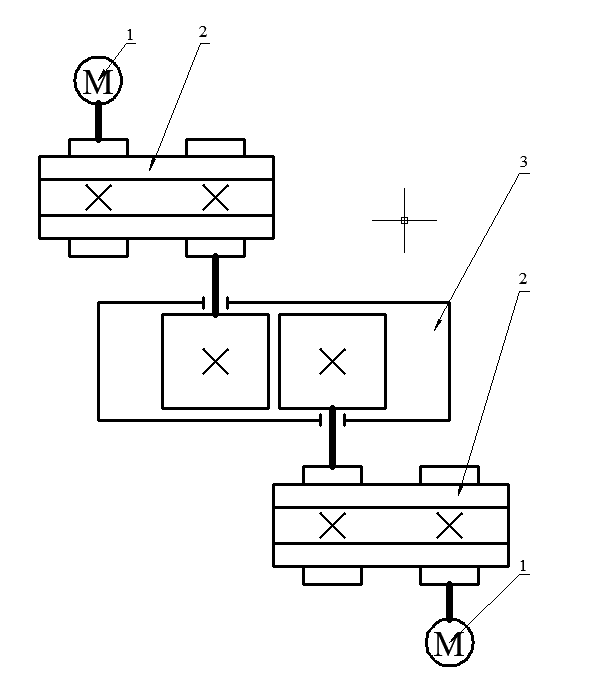
Рисунок 4.1 − Кінематичної схеми вальцевої дробарки; 1 – електродвигун, 2 – пасова передача, 3 – вальцева дробарка.
Визначаємо кутову швидкість швидкообертового валка:
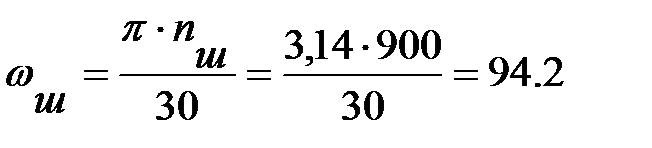 (рад/с), (4.8)
(рад/с), (4.8)
Визначаємо крутний момент:
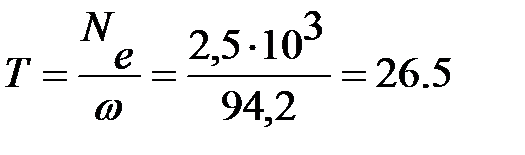 (Нм), (4.9)
(Нм), (4.9)
де  - потужність електроприводу, Вт;
- потужність електроприводу, Вт;
 - колова швидкість швидкообертового валка, м/с;
- колова швидкість швидкообертового валка, м/с;
Визначаємо потрібну потужність електродвигуна:
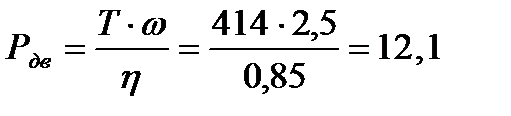 (кВт), (4.10)
(кВт), (4.10)
де  - коефіцієнт корисної дії приводу, який дорівнює добутку к.к.д. всіх ланок кінематичної схеми.
- коефіцієнт корисної дії приводу, який дорівнює добутку к.к.д. всіх ланок кінематичної схеми.
У нашому випадку є ряд ланок:
Клинопасова передача  .
.
Плоскопасова передача  .
.
| Змн. |
| Лист |
| № докум. |
| Підпис |
| Дата |
| Лист |
| ДП 1886/11.04.00.000 ПЗ |
 .
.
 . (4.11)
. (4.11)
Вибираємо електродвигун асинхронний АО2, закритого типу 61-1 потужністю 13 кВт і частоту обертів 1450 об/хв [4. П1, ст.390];
Номінальне число обертів двигуна:
 (об/хв), (4.12)
(об/хв), (4.12)
де  - ковзання в електродвигуні.
- ковзання в електродвигуні.
Кутова швидкість обертання вала електродвигуна:
 (рад/с), (4.13)
(рад/с), (4.13)
Уточнюємо загальне передаточне число:
 . (4.14)
. (4.14)
|
|
|
|
|
Дата добавления: 2015-07-13; Просмотров: 434; Нарушение авторских прав?; Мы поможем в написании вашей работы!