КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общие положения
|
|
|
|
ОБОРУДОВАНИЕ. СРЕДСТВА ИЗМЕРЕНИЙ. ПРИНАДЛЕЖНОСТИ
АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЯЮЩЕГО КОНТРОЛЯ МОДЕЛИ БВ 6230 (4270) И ЕЕ ПОВЕРКА
ЦЕЛЬ И СОДЕРЖАНИЕ РАБОТЫ
1. Ознакомление с назначением, принципом действия, техниче-скими характеристиками, комплектностью и устройством автоматической системы модели БВ 6230 (4270).
2. Изучение номенклатуры операций, выполняемых при поверке автоматических систем управляющего контроля.
3. Изучение и практическое усвоение приемов, используемых, при определении погрешности измерений автоматической системы управ-ляющего контроля.
4. Изучение и практическое усвоение приемов, используемых при определении погрешности срабатывания формирователей управляющих команд автоматических систем контроля.
5. Изучение и практическое усвоение приемов, используемых при определении погрешностей настройки формирователей управляющих команд автоматических систем контроля.
6. Приобретение первоначальных практических навыков работы с автоматической системой управляющего контроля модели БВ-6230 (4270).
7. Продолжительность работы — 4 часа.
1. Система автоматическая управляющего контроля модели БВ
6230(4270).
2. Стенд для поверки автоматической системы управляющего контроля.
3. Меры длины концевые плоскопараллельные ГОСТ 9038-59.
4. Головка измерительная ИГП-0,5 с ценой деления 0,0005 мм.
5. Головка измерительная (ортотест) с ценой деления 0,001 мм.
Система модели БВ 6230 (4270) предназначена для управления циклом обработки деталей на автоматических, полуавтоматических и универсальных центровых круглошлифовальных станках и выпускается Челябинским инструментальным заводом в 30 исполнениях (вариантах). Эти варианты учитывают особенности привязки механической и гидравлической частей измерительной системы к шлифовальным станкам различных моделей, а также различия требований, предъявляемых на практике к таким техническим характеристикам измерительной системы, как диапазон измерений и количество управляющих команд.
Система модели БВ-6230 (4270) включает в себя скобу настольную индуктивную 4 (рис. 6.1.) мод. БВ-3152-80, устройство подводящее 5мод. БВ-3 102-60, преобразователь индуктивный соленоидный дифференциальный 3 мод. 6067, устройство отсчетно-командное 1 (ОКУ) мод. БВ 6230-00 Д и имеет следующие технические характеристики:
А. Характеристики, постоянные для всех исполнений
Принцип действия…………………………………………………. индуктивный
Цена деления шкалы показывающего прибора
(ОКУ), мм ……………………………………………………… 0,001; 0,005
Диапазон показаний, мм
по шкале с ценой деления 0,001 мм …….0,080 (от -20 до + 60) по шкале с ценой деления 0,005 мм…………..0,400 (от -100 до + 300) Готовность к работе, мин ……………………………………………………..15
Б. Характеристики, соответствующие исполнению БВ-6230-00 Количество управляющих команд …………………………………………….2
Диапазон контролируемых размеров, мм ……………………………..10...80
Диапазон контролирования уровня срабатыва
ния команд, мкм
1. предварительная …………………………… от- 15 ± 3 до + 150 ± 15
2. окончательная ……………………………..от-25 ± 5 до + 10 ± 3 Измерительное усилие, Н
при контроле гладких поверхностей ………………………… 6,0 1,0
при контроле прерывистых поверхностей……………10 2,0 Погрешность срабатывания формирователей
окончательной команды, мкм………………………………………. 0,5 Смещение настройки после 1500 условных из-
мерений, но не более 4-х часов работы, мкм ……………………............. 0,8
Все элементы конструкции двухконтактной индуктивной скобы смонтированы на планке 20 (рис. 6.2), играющей роль корпуса. Измерительные наконечники 1 и 3 выполнены в виде твердосплавных цилиндров и закреплены в клеммных зажимах измерительных губок 5 и 33. В процессе наладки скобы губки перемещаются в вертикальной плоскости по направляющим 4 и 2 типа «ласточкин хвост» кареток 13 и 29 и закрепляются [ в требуемом положении винтами 9 и 31 (перемещения осуществляются с помощью зубчато-реечных передач при вращении валиков 8 и 32).
Каретки 13 и 29 подвешены к сухарям 18 и 25, жестко связанным с планкой 20, на плоскопружинных параллелограммах 15, 21 и 22, 27. Ход кареток ограничивается упорами 19 и 23 и регулируется поворотом эксцентриков 12 (положения эксцентриков фиксируются боковыми стопорными винтами).
Как показывает опыт, измерительные наконечники скобы 1 и 3 целесообразно предварительно заменить шариками с тем, чтобы обеспечить гарантированный «точечный контакт» в зонах соприкосновения соответствующих измерительных поверхностей.

Рисунок 6.1. – Автоматическая система модели БВ – 6230 (4270).

Рисунок 6.2. – Скоба двухконтактная индуктивная.
 Рисунок 6.3. – Измерительный преобразователь модели БВ – 6067.
Рисунок 6.3. – Измерительный преобразователь модели БВ – 6067.
Верхняя каретка несет настроечный винт 7, приводимый во вращение в процессе настройки скобы или корректировки этой настройки рукояткой 11 (выборка люфтов в резьбовой паре производится серьгой 10 и пружиной 14), нижняя - измерительный преобразователь 30 (закреплен в каретке с помощью клеммного зажима).
Возможность повреждения измерительного преобразователя, например, при снятии со станка готового изделия, устраняется ограничителем хода, выполненным в виде стакана 6; на верхний торец этого стакана опирается своим буртиком микровинт 7 при нерабочем положении скобы. Измерительный преобразователь и микровинт защищены от попадания грязи и пыли гофрированной манжетой из маслостойкой резины. Контактное усилие между губками скобы и контролируемой деталью обеспечиваются пружинами 16 и 22.
В корпусе скобы (планка 20) предусмотрено два резьбовых отверстия Мб для болтов крепления ее к подводящему устройству БВ-3102-60.
Измерительный преобразователь модели БВ-6067 состоит из корпуса 5 (рис. 6.3), измерительных обмоток 8 и 9, сердечника 21, соединенного обоймой 16 с якорем 6, экрана 14, 15 и подвески якоря - дисковых пружин 4 и 7. Якорь оснащен измерительным наконечником 1; возвратно-поступательное перемещение якоря (измерительного наконечника) ограничено упорами. Измерительное усилие создается пружиной 17, крепление отдельных элементов преобразователя внутри корпуса осуществляется гайками 2 и 18.
Измерительный преобразователь надежно герметизирован кольцом 19, гофрированной резиновой мембраной 20, резиновыми пробками 12, резиновой прокладкой, расположенной под его крышкой, и может успешно эксплуатироваться в условиях повышенной влажности и загрязненности окружающей среды.
Характеристики измерительного преобразователя модели БВ-6067 аналогичны характеристикам преобразователя модели Б-2, что легко объясняется идентичностью их конструкции (первый является базовой моделью второго). В отличие от системы Б-2 измерительные катушки преобразователя (также включенные встречно) образуют мост на переменном токе, совместно не с потенциометром установки нуля, а с вторичной обмоткой трансформатора задающего генератора (средняя точка трансформатора заземлена). Напряжение питания 1,5 В, частота 10...12 кГц.
При симметричном расположении якоря измерительного преобразователя относительно элементов магнитопровода и измерительных обмоток (геометрическая нейтраль) мост находится в состоянии баланса, уровень выходного (измерительного) сигнала минимален. При смещении сердечника от геометрической нейтрали индуктивность одной измерительной обмотки увеличивается, а второй - уменьшается. На выходе моста появляется переменное напряжение, амплитуда которого определяется размером смещения сердечника, фаза - тем, в какую сторону о нейтрали он смещен (при переходе сердечника через нейтральное положение фаза выходного сигнала изменяется на 180°).
Измерительный сигнал поступает к преобразующим и усиливающим каскадам электронной системы отсчетно-командного устройства. Электронная система вырабатывает в соответствии с размером и знаком текущих отклонений контролируемого параметра дискретные команды, воздействующие на цепи управления (органы электроавтоматики) станка, и аналоговый сигнал, поступающий на вход показывающего прибора - микроамперметра 3 (рис. 6.4).
На передней панели блока размещены:
- лампа 2 для индикации включения электрического питания блока
с помощью кнопки 1;
- показывающее устройство 3 со шкалой, служащей для настройки уровней срабатывания дискретных команд и для наблюдения за ходом процесса обработки; шкала показывающего устройства не предназначена для измерения размера обрабатываемого вала;
- потенциометры 11 для настройки уровней срабатывания предварительной команды и 10 - окончательной команды; для визуальной индикации о срабатывании этих команд служат соответственно сигнальные лампы 15 и 14;
- кнопки 5 и 6 для переключения масштабов шкалы показывающего устройства.
Нажатие кнопки 5 (- 20 + 60) соответствует подключению шкалы с
ценой деления 1 мкм; нажатие кнопки 6 (- 100 + 300) соответствует шкале с ценой деления 5 мкм.
Кнопка 9 (А + В) обеспечивает подключение к схеме одного индуктивного преобразователя, включенного в гнездо А, расположенное на задней панели блока управления; эта же кнопка обеспечивает возможность подключения к схеме блока второго индуктивного преобразователя 8 для работы в режиме суммирования двух сигналов (в приборе БВ-4270 не используется); кнопка 13 (А) в приборе также не используется;
- лампа 16 сигнализирует о включении электрических связей по командным цепям, поступающим к органам станочной электроавтоматики; лампа включается в момент окончания периода задержки срабатывания блокировочного реле времени «РВ», служащего для исключения выдачи ложных команд при установке индуктивной скобы в рабочее положение;
- кнопка 13 (РАБОТА) при нажатии подготавливает к включению связи по командным цепям со схемой станка; при нажатии кнопки 12 (НАЛАДКА) указанные связи отключаются, обеспечивая независимое функционирование прибора и станка в наладочном режиме работы;

Рисунок 6.4 - Передняя панель отсчетно – командного устройства автоматической системы управляющего контроля модели БВ-6230 (БВ-4270).
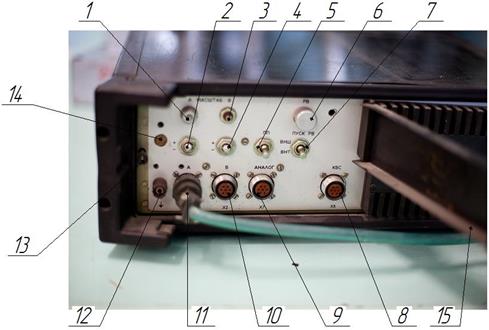
Рисунок 6.5 - Задняя панель отсчетно-командного устройства автоматической системы управляющего контроля модели БВ-6230(БВ-4270).
- рукоятка 7 многооборотного потенциометра электрической корректировки нуля, работающего только при нажатии кнопки 9 (А + В); при корректировке нуля ранее установленные интервалы между уровнями срабатывания команд сохраняются; диапазон корректировки 150 (75) мкм;
- кнопка 4 (ГРУБО); при нажатии кнопки обеспечивается расширение диапазона смещения стрелки по шкале 3, осуществляемого рукояткой 7; используется при установке и контроле уровней срабатывания предварительных команд в диапазоне всей грубой шкалы с ценой деления 5 мкм (при нажатии кнопки 6); фиксированного положения кнопка 4 не имеет;
На задней панели блока управления (рис. 6.5) размещены:
- розетка 11 (X1) для подключения кабеля индуктивного преобразователя «А», встроенного в скобу;
- розетка 10 (Х2) для подключения кабеля индуктивного преобразователя «В» (в приборе БВ-4270 не используется);
- тумблеры 2 и 4 для переключения полярности сигналов соответствующих индуктивных преобразователей «А» и «В»; работа прибора БВ-4270 обеспечивается установкой обоих тумблеров в положение «+»;
- масштабный потенциометр 1 (А) для юстировки чувствительности преобразователя «А» скобы;
- масштабный потенциометр 3 (В) для юстировки чувствительности индуктивного преобразователя «В» (в приборе БВ-4270 не используется);
- ручка потенциометра 6 (РВ) для настройки периода задержки срабатывания блокировочного реле времени. По окончании периода задержки обеспечивается включение электрических цепей выдачи команд в схему станка. Запуск реле времени «РВ» осуществляется размыканием контактов 5-19 во внешних цепях; размыкание этих контактов обеспечивается органами станочной автоматики в момент выдачи гидравлической команды «скоба вперед» (к детали);
- тумблер 7, в положении ПУСК РВ ВНЕШ (внешний запуск реле времени) обеспечивает автоматический режим работы системы в случаях, когда станочная схема способна осуществить запуск блокировочного реле; времени «РВ» в момент выдачи гидравлической команды «двухконтактная скоба вперед» (к детали). Второе положение тумблера 7 (ПУСК РВ ВНТ) - внутренний запуск реле времени - используется при работе с трехконтактной скобой, устанавливаемой на деталь вручную. В этом случае запуск реле времени «РВ» осуществляется не внешними электрическими цепями, а элементами собственной электронной схемы по сигналу индуктивного преобразователя, возникающему в момент установки контактных наконечников на заготовку, имеющую припуск. Уровень срабатывания этого сигнала в блоке управления БВ-6230 установлен в точке —15 мкм. В исходном положении трехконтактной скобы показание по шкале показывающего устройства должно быть ниже уровня «15 мкм» (например, показание должно соответствовать -50 мкм). Тумблер 5 (ПП) служит для отключения показывающего устройства прибора, расположенного на задней панели блока;
- клемма заземления 12 корпуса блока;
- держатель предохранителей 14;
- розетка 9 (Х7 — АНАЛОГ) для подключения кабеля перифернйрных электронных устройств, воспринимающих выходной электрический сигнал постоянного тока в аналоговой форме;
- розетка 8 (Х8 - КВС) для подключения кабеля микровыключателя КВС, контролирующего исходное положение двухконтактной скобы и производящего запуск реле времени «РВ» (используется в случаях, когда запуск «РВ» схемой станка не обеспечивается);
- поворотный щиток 15, исключающий доступ к органам управления в рабочем состоянии блока;
- винт 13 служащий для крепления поворотного щитка.
Поверка автоматической системы управляющего контроля модели БВ-6230 (4270)
Поверка автоматической системы управляющего контроля модели БВ-6230 (4270) включает в себя операции, приведенные в табл. 6.1. Перед определением метрологических показателей (погрешности измерений, погрешности срабатывания формирователей управляющих команд, погрешности настройки) система проходит обкатку (выполняет не менее 200 условных измерений; при каждом измерении производится выдача всех без исключения управляющих команд) и выдерживается в рабочем пространстве не менее 6 часов. Измерительные поверхности тщательно промываются авиационным бензином.
Табл. 6.1. Операции, выполняемые при поверке автоматической системы управляющего контроля, и условия их обязательности
| № п/п | Наименование операции | Средства поверки и их нормативно-технические характеристики | Обязательность проведения при: | |||||||
| выпус. из производства | ремонте | эксплуатации | ||||||||
| 1. | Внешний осмотр: про верка комплектности. внешнего вида и дефек тов покрытии | да | да | да | ||||||
| 2. | Проверка присоединительных размеров и собираемости съемных частей | Линейка измерительная металлическая О... 300 мм ГОСТ 427-75. штангенциркуль ШЦ-1 ГОСТ 166-73. микрометры с ценой деления 0.01 мкм и пределами измерений О...25 и 25... 50 мм | да | да | нет | |||||
| 3. | Проверка взаимодейст вия отдельных частей, функционирования орга нов управления, регулирования, фиксации и пе ремещения | да | да | да | ||||||
| 4. | Определение шероховатости измерительных поверхностей | Образцы шероховатости поверхности (рабочие) ГОСТ 9378-60 или приборы оптические для оп ределения шероховатости типа МИ-4.МИС-11 | да | да | нет | |||||
| 5. | Определение измерительного усилия | Весы циферблатные ВЦ ГОСТ 13882-68, устройство с крон штейном для закрепления измерительной скобы и механизмом микроподачи измерительного наконечника | да | да | нет | |||||
| 6. | Проверка электрической прочности изоляции | Пробойно-испытательная установка У ПУ-1 | да | да | да | |||||
| 7. | Проверка сопротивления изоляции | Омметр ГОСТ 8038-60 | да | да | да | |||||
| 8. | Определение погрешно сти измерений а) на участке 10 делений от нулевой отметки шка лы; б) на всей шкале | Стойка С-1 ГОСТ 10197-70, го ловка измерительная пружинно-оптическая С2П ГОСТ 10593-74, кронштейн для закрепления из мерительной скобы, плоскопараллельные концевые меры длины кл. 1 ГОСТ 9038-59 с разностью размеров равных Ул, Уг и полному диапазону показаний по точной и грубой шкалам ОКУ | да | да | да | |||||
| 9. | Определение нестабильности (погрешности) срабатывания формиро вателей команд при номинальных и экстре мальных значениях напряжения питания | Стойка С-1 ГОСТ 10197-70, головка измерительная пружинно-оптическая 0.2П ГОСТ 10593-74, кронштейн для закрепления измерительной скобы, плоскопа раллельные концевые меры длины кл. 1 ГОСТ 9038-59 с разностью размеров равных 'Л, Уг и полному диапазону показаний по точной и грубой шкалам ОКУ, регулятор напряжения с вольт метром | да | да | да | |||||
| 10. | Определение погрешно сти настройки формиро вателя окончательной команды | То же | да | да | нет | |||||
| 11. | Определение смещения настройки при длитель ной обкатке | Стенд обкаточный, контрольная (установочная) оправка, оправка с лыской. Скорость вращения оправок-30 1/мин | да | да | да | |||||
| 12. | Проверка внбропрочности | Вибростенд (амплитуда колеба ний 0.3 мм. частота 50 Гц) | да | да | да | |||||
| 13. | Проверка работоспособ ности и взаимодействия частей, герметичности соединений, проверка ширины контактного следа | Центровой круглошлнфовальный станок (давление масла в гидро системе 1.0... 1,2 МПа), прибор электроизмерительный комбини рованный переносной Ц-57 ГОСТ 10374-63 или аналогичный ему. или контрольная лампа | да | да | да | |||||
| 14. | Определение погрешно сти обработки | Центровой круглошлифовальный станок нормальной точности, от вечающий требованиям ТУ на данное оборудование, образцовая деталь, прибор операционного контроля с ценой деления не бо лее 1/6 поля допуска на контро лируемый параметр | да | да | да | |||||
Колебания температуры окружающей среды во время определения метрологических показателей системы не должно превышать 1 К при по-верке систем, оснащенных настольными скобами, и 2 К при поверке систем, оснащенных навесными скобами.
|
|
|
|
|
Дата добавления: 2017-02-01; Просмотров: 390; Нарушение авторских прав?; Мы поможем в написании вашей работы!