КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
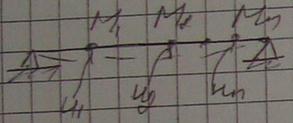
Дифференциальные ур-я движения систем с конечным числом степеней свободы
|
|
|
|
Лекция №5
Ур-е в прямой форме:
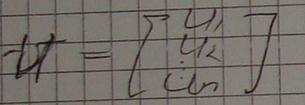
Введем вектор перемещения систем:

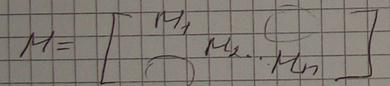
Вместо параметра инертности М (масса или момент инерции) введем матрицу инертности. В наиболее простом случае диагональный вид.
Вместо коэффициента жесткости введем матрицу жесткости.
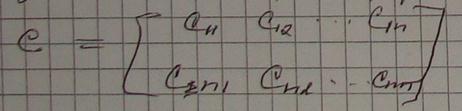
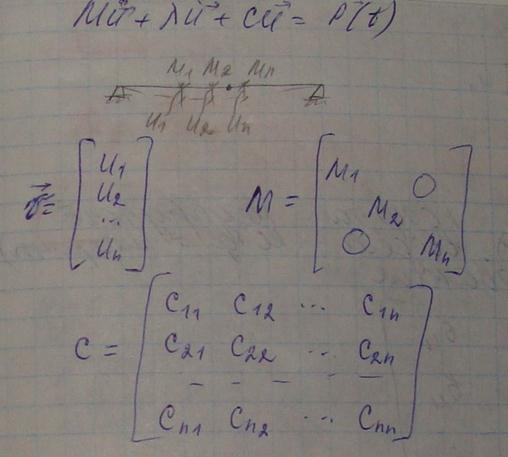
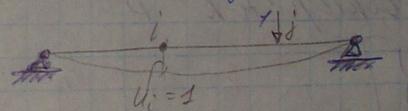
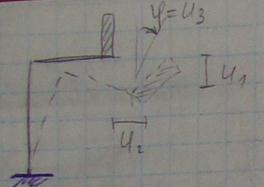
Сij – величина силы (или пары сил), которую следует приложить к инертному элементу по j-тому направлению для того, чтобы получить единичное перемещение(линейное или угловое) в направлении i-той координаты. (ед.скорость)
Коэффициент жесткости совпадает с коэффициентом rij канонических ур-ий метода перемещений.
Размерность коэффициента жесткости соответствует размерности силового фактора ÷ на размерность перемещения.
Три системы с n степенями свободы может иметь 4 варианта размерностей
С = [ кН/м; кНм/рад; кН/рад=кН; кНм/м=кН]
Вместо коэффициента неупругого сопротивления λ, введем коэффициент (матрицы) демпфирования.
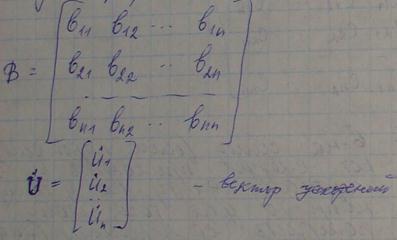
Вместо параметра нагрузки P(t) введем вектор нагрузки P̅:
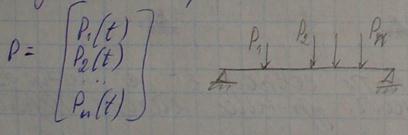
В матричной форме ур-е движения системы имеет вид:
 (59) – ур-е вынужденных колебаний с сопротивлением.
(59) – ур-е вынужденных колебаний с сопротивлением.
 (60) – свободные колебания сопротивлением.
(60) – свободные колебания сопротивлением.
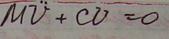 (61) – свободные колебания без сопротивления.
(61) – свободные колебания без сопротивления.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 416; Нарушение авторских прав?; Мы поможем в написании вашей работы!